有限元软件在真空电弧炉称重机构结构分析中的应用
我所在研发VCFW- 8T 真空自耗电极电弧炉过程中,提出了能否延用VCFW- 3T 电弧炉称重机构的问题。针对此问题,首先利用Algor 软件对VCFW- 3T 称重机构进行强度分析,再尝试更改工况条件,分析其能否满足VCFW- 8T 的实际使用要求并进行系列化应用。除此之外还探索Algor 在真空炉优化设计中的应用效果。
真空电弧炉的电子称重机构(以下简称称重机构)是全自动的恒熔速控制真空电弧炉的关键核心机构,设备利用该机构实时检测的电极系统重量变化过程参数作为智能闭环过程控制的输入反馈信号,通过与预先定量设计的编程参数的比较计算,实现引弧、恒熔速熔炼、热封顶等工艺过程的全自动控制。Algor 是一款大型通用有限元软件,可以方便的导入各种格式的三维模型文件,并建立有限元网格,进行多种类型的分析,同时Algor 的非线性分析功能中还提供机械运动仿真功能,可以分析在机构运动过程中的受力等情况。
1、背景分析
我所在研发VCFW- 8T 真空自耗电极电弧炉项目时,在其称重机构设计过程中,考虑到产品标准化、系列化问题,提出了能否延用已定型成熟的VCFW- 3T 电弧炉称重机构的假设。对于3 t电弧炉称重机构的分析主要在于验证其设计能否满足VCFW- 8T(以下简称8 t 电弧炉)的工况条件,并在8 t 电弧炉工况条件下得出最终结论。
由于在VCFW- 3T 电弧炉称重机构设计过程中主要以传统的人工计算与经验设计为主,同时为了便于后续系列化应用,在设计过程中留有较大的富余量,因此真空技术网(http://www.jnannai.com/)的本文才提出了将3 t 电弧炉的称重机构应用到8 t 电弧炉的可行性问题。
2、问题简化
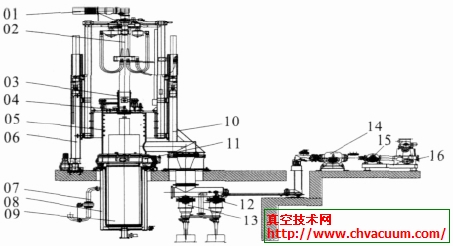
如图1 所示称重机构的基本原理可以概括为,框架上方的两个活动支座将电极系统所有的重力传递到调整柱上,再于调整柱将重力传递到三个压力传感器上。整个机构类似杠杆原理将力有效分配。机构的传感部分及控制部分等相关原理不属于本文分析及讨论内容,故在此不赘述。

图1 称重机构示意图
综上,我们可以把此机构简化为框架及上下四个支座受力问题(下框架可简化为材料力学问题,可易知变形小,不在考虑之内),如图2 所示。那么此问题的结构分析,就可以等同于分析此框架及附件在受外力情况下的变形及失效问题。

图2 简化后的模型
从框架结构可知,四个支座都是通过销轴将力传递到框架的,整个框架受力矩作用,框架的焊缝或开椭圆孔处由于几何形状突变导致应力集中,可能失效;销轴受剪切力作用,销轴与框架连接部位可能出现由剪切应力引起失效。由上述分析,可得出可能产生失效的原因归纳如下:
(1) 销轴受剪切力,剪切失效;
(2) 框架交界焊缝处,应力集中产生破坏;
(3) 框架上下板开椭圆孔处,应力集中产生破坏;
其中我们在分析过程将第一个可能性与后两个分开进行分析,并分别对模型进行适当的简化处理。
3、销轴部分分析
3.1、前处理及求解
从称重机构的机械工作原理可知,每框架上部的两上支座与下部两支座受力情况一致,每个支座受整个称重机构受力的一半,我们在设置边界条件时,由长期经验作以下假设:
(1) 3 t 电弧炉加载在称重机构上的力,最大情况下不大于6 t (包括自耗电极及电极杆等其它附件)。
(2) 8 t 电弧炉加载在称重机构上的力,最大情况下不大于16 t(包括自耗电极及电极杆等其它附件)。
以上两点假设的受力数值大于实际情况,用于保证安全性。
由于针对第一个假设进行建模,针对应力可能集中的部分,将网格进行局部细化。分别按3 t 电弧炉与8 t 电弧炉的假设工况设置边界条件并进行求解。
3.2、分析结果

图3 销轴的分析结果
从图3 中列出了销轴分别在受3 t 与8 t 力(由于对称,所以受载为假设总载荷的一半)的情况下的应力与位移结果图。从图中结果我们可以得出在8 t 电弧炉工况下(受力16 t 的情况下),销轴受剪切力小于45# 钢的抗剪强度,没有发生剪切破坏。从最大应力112 MPa 的情况来看,此处产生的剪切应力已经比较大了,但仍可通过加粗直径等方法来减小。
由于,剪切未使销轴破坏,我们可以进一步简化模型,将模型简化为框架直接受力,进一步分析框架上可能出现的失效现象。
4、框架部分分析
4.1、前处理及求解
从整个框架的结构来看,两个朝上的支座把力加载到框架上的销轴上,再由两个向下的支座把力加载到下面的机构中。整个框架主要受到由
力引起的力矩作用,在其薄弱处可能产生破坏。针对简化模型与假设工况,进行边界条件的设置,把力加载到框架的左右两侧销轴处(此处支座向上),将向下的支座对应的两销轴设为固定,并进行求解。
在划分网格时,由于框架主体为方管,预估变形不大,采用块体单元(六面体主导的混合网格,单元空间4~20 个节点)网格较为合适[3]。
4.2、一般网格分析结果

图4 框架分析结果

图5 细化网格之后的分析结果
从分析的结果(如图4 所示)可以得知应力主要集中在椭圆开孔处和焊缝处。边界条件为3 t 电弧炉实际工况时,集中应力应力较小为38 MPa,当边界条件为8 t 电弧炉时,框架最大应力为100 MPa,且两种工况的最大应力均出现在框架后部椭圆孔处。从应力分部图中也可知,方管焊缝处和销轴支座与框架焊接处也有较为明显的应力集中,在8 t 电弧炉工况下,以上部位集中应力达到了70 MPa~80 MPa。
为保证结果的准确性,我们在求解过程中,除采用上述参数进行计算求解外,还针对此问题,使用了细化网格和二阶单元分别进行求解,并比较几种方法的分析结果。
4.3、细化网格分析结果
对于整个模型进行细化处理,而后针对应力集中往往出现在表面的情况,还要对表面网格进行增强处理。使网格质量大大提高。但从结果上看,其变化小,说明了相对于整个框架的大小,原先的网格划分是合适的。
4.4、二阶单元分析结果
使用二阶单元分析,主要是起到验证性的作用,当应用二阶单元网格的分析结果与原分析结果相差很多时,说明原分析可能在网格设置上有错误。应用二阶单元,主要目地是为了改善块单元的刚性,使其更适合变形量较大的情况[4]。由于二阶单元会使计算时间大增,同时也由于二阶单元在使用时不需要过密的网格,所以在分析时,我们人为地将网格的大小还原致默认大小(约比原分析大10%)以提高运算速度,且不致于降低求解精度。
从分析结果中来看使用二阶单元网格会使求解结果变大,但变化不明显。使用二阶单元消耗了大量的计算时间,几乎是原来计算时间的十倍左右,而结果却增加不多。这既说明了,此模型中变形很小,应用二阶单元并未取得很好的效果,又说明了原先的网格划分和求解解果是可信的。

图6 二阶单元网格分析结果
4.5、分析结果
经过以上分析,得出如下结论:
(1) 此套称重机构完全可以胜任3 t 电弧炉的工况要求,这一点无论从现场使用情况,还是从CAE 分析情况来看都是没有问题的。
(2) 在分析过程中,对一些工况参数做了放大处理得到了假设工况,比如加载力的大小和对于焊缝的处理上。在实际情况中称重机构框架的焊缝比较大,而在分析中采用简化处理,所以实际中的大焊缝会对整个框架的应力集中处起到补强的作用,从实际中看,这种补强的效果很明显,所以如果8 t 电弧炉应用此套称重机构,其结果会好于CAE 分析结果。
(3) 对于8 t 电弧炉的工况来说,虽然分析结果未导致失效,但是建议在集力应中处进行补强,如:加大销轴直径、在框架内部加支撑角钢、在开孔处加补强片等方法。
5、总结
(1) 对于此类工程问题,远非材料力学、理论力学等基础力学所能解决。目前在很多实际工程问题中往往凭工程师的经验及简化计算来设计,存在着较大的设计余量。
(2) 通过分析此套称重机构,只须对局部进行适当优化即可应用在8t 电弧炉上。同时也就意味着此套机构能应用在3t 到8t 电弧炉系列化产品中,避免了系列化产品的重复设计,提高了研发效率。
(3) 通过实践证明,Algor 软件能够胜任工程中的结构分析问题,应用有限元软件可以有效地帮助工程设计人员更好的优化设计,节约研发成本。