基于真空吸附的微器件受力分析研究
微裝配的對(duì)象主要是微米級(jí)或亞毫米級(jí)尺寸的微器件,這些微器件的輕、小、薄、軟的特征對(duì)微夾持器的夾持方式和夾持力的控制提出了非常嚴(yán)格的要求和限制。本文針對(duì)平板類微器件設(shè)計(jì)了一種真空吸附式微夾持系統(tǒng),不僅可以吸附不同形狀和尺寸的零件,而且可以實(shí)現(xiàn)零件位姿的調(diào)整和接觸力的檢測(cè)。在只考慮范德華力的情況下,本文重點(diǎn)建立了微器件的吸附力學(xué)模型,為實(shí)現(xiàn)穩(wěn)定吸附與釋放提供了計(jì)算依據(jù)。最后完成了精度要求為平行度誤差不大于8 μm 的微組件裝配實(shí)驗(yàn),裝配效果良好。
微機(jī)電系統(tǒng)(MEMS) 的概念自20 世紀(jì)60 年代提出以來(lái),發(fā)展速度非常迅速,對(duì)微裝配技術(shù)提出了很高很嚴(yán)格的要求。我國(guó)的MEMS 技術(shù)研究雖然起步晚,但到目前為止也已經(jīng)有40 多個(gè)單位的50多個(gè)研究小組在各方面取得了顯著進(jìn)展。MEMS產(chǎn)品一般都由較多的微小功能元件組成,因而其裝配技術(shù)是MEMS 應(yīng)用研究的關(guān)鍵技術(shù)。
目前越來(lái)越多的MEMS 產(chǎn)品由平板類微器件構(gòu)成,怎樣實(shí)現(xiàn)此類零件的高效率裝配,如何保證穩(wěn)定可靠的吸附與釋放,這些已經(jīng)成為制約此類零件裝配的瓶頸。目前已經(jīng)有很多研究機(jī)構(gòu)及學(xué)者進(jìn)行了平板類微器件的拾取技術(shù)研究,并取得了諸多相關(guān)的研究成果。如:應(yīng)用MEMS 體硅工藝將靜電梳齒驅(qū)動(dòng)與真空吸附結(jié)合構(gòu)成復(fù)合式驅(qū)動(dòng),研制出一種復(fù)合式微夾持器;針對(duì)平板類零件的特點(diǎn),設(shè)計(jì)了真空吸附微夾持器,按照裝配對(duì)象的不同,采用不同孔徑的吸嘴進(jìn)行吸附,通過(guò)理論計(jì)算和實(shí)驗(yàn)獲得吸附力理論數(shù)據(jù)。針對(duì)球形或表面質(zhì)量要求
較高的微目標(biāo)設(shè)計(jì)了一種真空微夾鉗,對(duì)球形微目標(biāo)進(jìn)行了吸附與釋放受力分析。又如:根據(jù)微觀連續(xù)介質(zhì)理論和空隙修正理論,推導(dǎo)出被鑷物體同微鑷子間吸附力的數(shù)學(xué)模型,為真空微鑷子的結(jié)構(gòu)設(shè)計(jì)和電路控制提供了理論基礎(chǔ)。這些研究對(duì)于實(shí)現(xiàn)微器件的穩(wěn)定拾取與釋放具有很重要的實(shí)用價(jià)值。平板類微器件一般都具有很高的表面質(zhì)量要求,對(duì)吸附力和接觸力的控制就會(huì)比較嚴(yán)格。本文針對(duì)MEMS 機(jī)構(gòu)中平板類微器件設(shè)計(jì)了一種基于真空吸附的微夾持系統(tǒng)。重點(diǎn)對(duì)微器件在不同吸附與釋放條件下進(jìn)行了它的受力分析,建立了力學(xué)模型,為實(shí)現(xiàn)穩(wěn)定可靠的吸附提供了計(jì)算依據(jù)。結(jié)合力學(xué)分析進(jìn)行了微組件的裝配實(shí)驗(yàn),裝配效果良好。
1、吸附式微夾持系統(tǒng)設(shè)計(jì)
1.1、整體系統(tǒng)組成
根據(jù)裝配工藝流程、裝配策略和技術(shù)要求,對(duì)所要完成的裝配任務(wù)進(jìn)行了分析研究,采用先整體后局部的設(shè)計(jì)思想,對(duì)微夾持系統(tǒng)進(jìn)行了總體設(shè)計(jì)。對(duì)于平板類微器件傳統(tǒng)的機(jī)械夾持方式已經(jīng)不再適用,而真空吸附因其無(wú)損夾持、控制方便廣泛應(yīng)用于這類零件的裝配中。因此,本文采用真空吸附作為微夾持系統(tǒng)的夾持方式,其系統(tǒng)框圖如圖1 所示,實(shí)物樣機(jī)如圖2 所示。
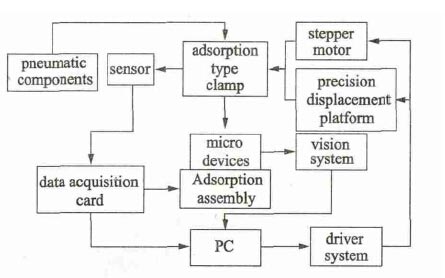
圖1 真空吸附式夾持系統(tǒng)框圖
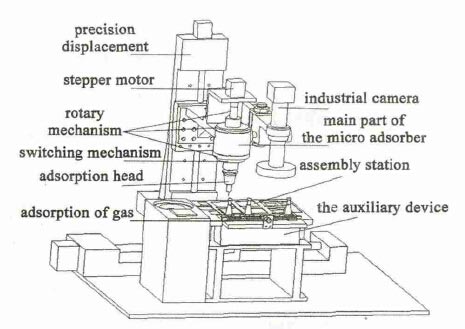
圖2 真空吸附式夾持系統(tǒng)
該系統(tǒng)主要由四部分組成:精密電控位移臺(tái)、微吸附器(真空吸附式微夾持器) 主體部分、吸附氣路系統(tǒng)、軟件控制系統(tǒng)。其中,微吸附器主體部分又包括旋轉(zhuǎn)機(jī)構(gòu)、換接機(jī)構(gòu)、傳感器、末端吸附頭,可以實(shí)現(xiàn)零件姿態(tài)調(diào)整、換接吸附頭、自動(dòng)急停和接觸力檢測(cè)等功能,是總體方案中最主要的部分;輔助換接裝置主要功能是輔助主體部分完成吸附頭的換接動(dòng)作,盛放備用的吸附頭;吸附氣路系統(tǒng)則主要完成微器件的吸附和釋放,同時(shí)為換接機(jī)構(gòu)和輔助裝置提供氣動(dòng)動(dòng)力;軟件控制系統(tǒng)主要完成氣動(dòng)元件的控制、位移臺(tái)和步進(jìn)電機(jī)的控制、通過(guò)機(jī)器視覺(jué)完成零件識(shí)別和位置調(diào)整。
5、結(jié)論
針對(duì)平板類微器件輕、小、薄、軟的特征以及較高的表面質(zhì)量要求,本文設(shè)計(jì)了一種基于真空吸附的微夾持系統(tǒng),可以針對(duì)不同形狀或大小的零件自動(dòng)更換吸附頭,而且能夠調(diào)整零件位姿和檢測(cè)接觸力的大小。分析了零件吸附和釋放的受力情況,確定了穩(wěn)定吸附與釋放的條件,同時(shí)建立了微器件在運(yùn)動(dòng)狀態(tài)下的力學(xué)模型,為實(shí)現(xiàn)微器件的穩(wěn)定吸附與釋放提供了計(jì)算依據(jù),對(duì)提高裝配效率和成功率具有重要意義。最后,進(jìn)行了微組件裝配實(shí)驗(yàn),裝配平行度誤差基本滿足不大于8 μm 的精度要求,裝配效果良好,微夾持系統(tǒng)性能穩(wěn)定,工作可靠。