����(j��)���SCAD�D�M(j��n)�����S��ģ�ķ���
����AutoCAD��һ���Ԅ�Ӌ��C(j��)�o���O(sh��)Ӌܛ�������V����(y��ng)���ڶ��S�L�D��Ԕ��(x��)�L�ơ��O(sh��)Ӌ�ęn�ͻ������S�O(sh��)Ӌ���F(xi��n)�ѽ�(j��ng)�ɞ���H�ϏV�����е��L�D���ߡ�AutoCAD�Ķ��ęn�O(sh��)Ӌ�h(hu��n)������Ӌ��C(j��)���I(y��)�ˆTҲ�ܺܿ�،W(xu��)��ʹ�á�ʹ��AutoCAD�M(j��n)�ж��S�L�D�������ЙC(j��)е�ƈD���A(ch��)���ˁ��f��һ�㶼���^�������ա��������S��ģ���e���ԌW(xu��)�ߣ��s���X�ò�֪�ĺ����֡���ƪAutoCAD�̳��ͽ̴������ҕ�D�L�����S��(sh��)�w�D�r��������ģ�^�̵IJ��E�ͷ�����
һ��������ҕ�D���_�����w��ģ������(bi��o)ƽ��
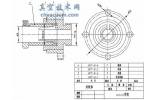
�������õ�һ����ҕ�D������Ҫ�����Ƿ�����������w���֣�������(sh��)���w���Π������D�����Ă�ҕ�D�С��Ķ��_�������S�D�ĵ�һ���D�D�x�����S�D�ĵ�һ������(bi��o)�档�@һ�c(di��n)����Ҫ�����W(xu��)�����������κη�����һ����Ĭ�J(r��n)�ĸ�ҕ�Dƽ�����齨ģ�ĵ�һ���L�Dƽ�棬�Y(ji��)�����ں��m(x��)��ģ����ɻ�y��

�����������Ҫ���֞�ׂ��S��ƽ�е�ͨ�A�������Π�������A������ҕ�D���@������ҕ�D�У���ˣ������S�D�ĵ�һ���������ҕ�D���������x����ҕ�D��������ҕ�D�®�����ҕ�D��������ҕ�D��ȫ���D����

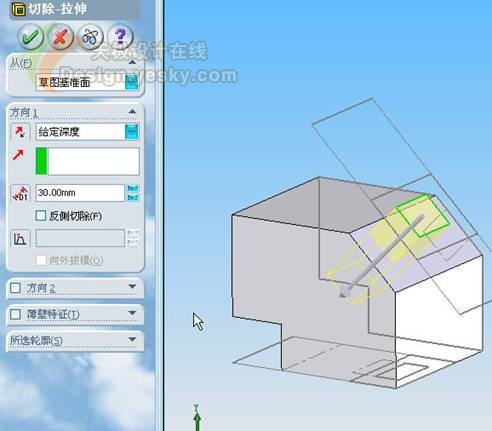
����������������D�����µװ�-��߅�μ����еĈA�ף����w-�AͲ���߰�ȣ����ڸ�ҕ�D���ʑ�(y��ng)�ڸ�ҕ�D�®�����ҕ�D�еĸ�ҕ�D��
�����D3�������S�Dģ�����S�D�������@������Ҫ�Y(ji��)��(g��u)���Π������D�D�A���ڸ�ҕ���ʑ�(y��ng)�����ڸ�ҕ�D�����D���D3��

������(g��u)��̎�����M����һ��������ɻ�����ģ����
�����_�����L�D������(bi��o)ƽ����������ڴ�ƽ�����L�ƽ�ģ�Ļ��A(ch��)�D���ˡ����ָ������ģ�Ļ��A(ch��)�D�β�������ȫ�ճ���ҕ�D�ĈD�Σ��������(g��u)��̎�������^��(g��u)�ͣ����Ǯ��������w��ԓ����(bi��o)ƽ�����ܷ�ӳ�䌍(sh��)�H�Π�ɹ������Řӡ����ӵČ�(sh��)�ΈD��
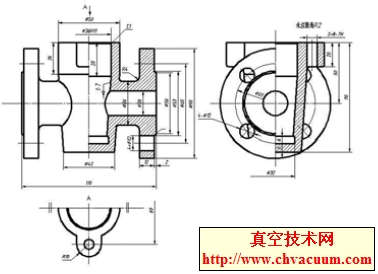
������D1��ʾ����������A��Ͳ�����ߴ�Ҫ���D4����ʾ6���Gɫ�A���c�����AͲ����֧�ε��߰壬�t�ö�ξ������D4�еļtɫ�D�Ρ������ɉK�߰壬�ö�ξ������D�еăɂ��Sɫ���Ρ� �D4��

�����@��̎����ԓ����Ľ�ģ��������һ����������ɡ�
������Ҫ��(d��n)�ļtɫ�߰崩�^�˃ɈAͲ�Ŀף��@�����ڌ��AͲ���õ��A�M̎����Ҫע����DZ���Ȳ����@�Ǻ�Ԓ��
��������D3��ʾ��������(c��)��AͲ���ö�ξ������D5����ʾ�Gɫ�D��;�҂�(c��)�ă�(n��i)���I��Ҳ��ö�ξ�����;���g��ˮƽ�߰壬�t�ö�ξ�������D�еļtɫ�D�Ρ�
����ԓ����д�ֱ����������߰壬�����ڸ�ҕ�D�в���ӳ��(sh��)�Σ��ʲ����ڴ˘�(g��u)�ͣ�������̎����

�����_������ϸ����w�Ľ�ģλ��
���������˸����w�Č�(sh��)�ΈD�����D(zhu��n)�����ϵ��S�y�D�£��M(j��n)�����졢�ŘӵȽ�ģ������������ȴ_�������w��ģ�Ĝ�(zh��n)�_λ�á�
�������ԈD3��ʾ������������(c��)��A���w���¶��棬���҂�(c��)�AͲ���¶����4mm,�����gˮƽ�߰���¶��棬�ֱ����(c��)��A���w���¶����2mm�����˳ߴ猢���(c��)�D�κ����g�tɫ�D���Ƅӵ�λ��D6��

����֮�ɰ��ߴ猢���D���쵽λ����D7��

����������_����һ���L�Dƽ��鸩ҕ�Dƽ��r�������D�ξ�̎������ĵײ�(Z�S����������);����һ���L�Dƽ�����ҕ�Dƽ��r�������D��λ������ĺ���(Z�S��������ָ���L�D��);��һ���L�Dƽ�����ҕ�Dƽ��r�������D�΄tλ��������Ҷ�(Z�S����������)��
������D1��ʾ��������D(zhu��n)�����ϵ��S�y�D���Ժ�횰���ҕ�D������(bi��o)���߰�ĺ���������ԓ�������(���������AͲ�ĺ���)��λ���M(j��n)���Ƅ�(�Ƅ�ǰ��(y��ng)��(zh��n)�_Ӌ�����(y��ng)�ƾ��x)����D8��

����֮�ɰ��ߴ猢�����w���쵽λ��D9��

�����@��̎���Ժ�����߶�һ������ֵ��ֱ��ݔ�딵(sh��)�ּ��ɡ�
�ġ�����λ�õĽ�ģ
����������Щ��������ģƽ���(n��i)��ӳ��(sh��)�εIJ��֣�һ����ڄ��Ž�ģ�����ϵ��S�y�D���M(j��n)��̎�����еĿ�ֱ���ڴ����S����(bi��o)ϵ�®�����(sh��)�ΈD�����M(j��n)�������ŘӵȲ������еı���{(di��o)��UCS����(bi��o)��
�������ԈD3��ʾ������������������ϵ��S�y�D�°��䶨�ζ�λ�ߴ�ֱ��������ֱ�߰�Č�(sh��)�ΈD-���Σ���D10�е��Sɫ���Ρ�Ȼ���ڴ�����(bi��o)ϵ��ֱ�ӌ��������M(j��n)���������(����ǰ�����S��ξ���������Σ����ڮ����Εrֱ�������S��ξ���)��Ҫע����ǣ�����ˌ�(sh��)�ΈD����ԓ�߰�ĺ�ƽ���ϣ�����r�߶�ȡ��ֵ;�������ԓ�߰��ǰ�����ϣ�����r�ĸ߶ȑ�(y��ng)ȡؓ(f��)ֵ���D10�Ю����߰�ĺ�����ϡ��D10��

�����M(j��n)�в������õ���(sh��)�w��D11��

�����D12��ʾ���������քe��������ͬ������(bi��o)ƽ���ϡ�����ҕ�D��֪��ˮƽ���ڸ�ҕ�D�з�ӳ��(sh��)�Σ��ʻ��A(ch��)��ģƽ����x��ҕƽ�档�ڸ�ҕ�D�®���ˮƽ��Č�(sh��)�ΈD���D(zhu��n)���ϵ��S�y�D�M(j��n)�������ˮƽ�匍(sh��)�w��֮����ڴ����S����(bi��o)��ֱ��׃�QUCS����(bi��o)(��Z�Sʸ��)����������Č�(sh��)�ΈD��������Ρ��D12��

������λ��Ҫ���cˮƽ��Ɍ�(sh��)��
���������cˮƽ���135°�A�ǵ�б�壬������D(zhu��n)����ҕ�D����λ��Ҫ���cˮƽ��Ɍ�(sh��)��135°��б������D13��

����Ȼ���ÄӑB(t��i)�^��x�����D(zhu��n)�����^���λ�ã������c(di��n)�_��UCS����(bi��o)λ�ã���D14��ʾ��

�������������ڴ�����(bi��o)ϵ�®���б��Č�(sh��)�ΈD����D15��

�������ߴ�Ҫ�����쵽λ����D16��

�������������Ɍ�(sh��)�w��ģ���D17��

�������ָ�������S��ģ�ķ����ܶ࣬;��Ҳ���в�ͬ���������e�����Ľ�ģ�����H���T��֮һ������ģ˼·����(y��ng)ԓ��ˡ�