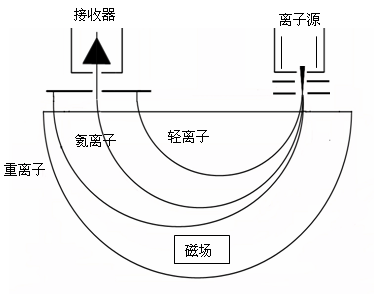
��������a�������ͱ�ͬ������
����ϵ�y���U����늙C�����ͱ�ݔ�͵V�{��ֵ��ɢ���g���ڷ������_���ͱ������}�Ӽ������}�Ӯa��ԭ���ǰ���£�Փ���˶��_����ͬһ��·ݔ�͵V�{�r�a����ֵ�B�ӵ�ԭ��������ֵ�B�ӵăɂ��l�����R�e��ѷ�ɢ���ֵ��ᘌ��F�ж�늙C�Åf�{ݔ��ϵ�y������늙C�S���P��ͬ�����Ʋ��ԣ�����˻�������a����ͬ�����Ʋ��Ԍ��Fݔ�͵V�{��ֵ��ɢ��
�������S�ˇ�b���У����������ö��_����ʽ��(�����������������Ĥ��ʽ�ı�)��ͬһ�l�ܵ�ݔ�͵V�{�Ĺ��r�������b�Þ���_늙C�����@��r�У��r�����F��ӣ�������ݔ�͉����^�ߕr������Ȟ鄡�ҡ�������ɢ���ֵ�R�e���OӋ�օ^�ƄӸ������ö�늙C��ͬ���ӣ���ͬ�����ܕ���������S�������Բ�ƥ�䡢ؓ�d�Ĕ_�ӵ����ص�Ӱ푶���������ˣ���늙Cͬ�����Ƴɞ����ͱ�ݔ���ϝ{���P�I����֮һ���������������W�ߌ���늙C�ӵęCеϵ�y��ͬ�������M���ˏV�����о���������ռ��g�W(http://www.jnannai.com/)��ǰ�l��������Ҳ�f����ͬ�����Ƶ�һЩ�����������ڴ˻��A�ϣ��������ͱõČ��H���r�������������ͬ�����Ʋ��ԡ�
1�����ͱù���ԭ��
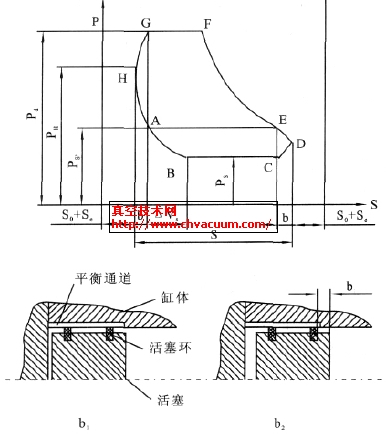
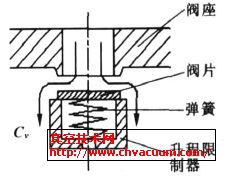
�������ͱ�������ʽ�����á�����ʽ�����á�����ʽ������Ĥ�õȶ�N�Y����ʽ���乤��ԭ����D1 ��ʾ�����������B�U�C�������D�\���D׃��ֱ���\�ӣ��Ƅӻ��������\�ӣ����ǻ���ݷe׃������ɵV�{ݔ�͡�
�������ͱû�������λ��X �Ĺ�ʽ�飺
![]()
����ʽ�У�ϕ �������D�ǣ�ϕ = ωt ������ω ���������ٶȣ�t ��r�gλ = RL��R �������돽��L ���B�U�L�ȡ�������ʽ�������ƌ����θ׆��������ͱõ�˲�r��Փ�����Ĺ�ʽ�飺

����ʽ�У�qs ��˲�r��Փ������A �������e������λ = RL��ֵһ���С�����Ժ��Բ�Ӌ���tʽ(2)׃�飺
![]()
�����@Ȼ���θ׆��������ͱõ�˲�r��Փ�������}�ӵġ����I���a�У��ձ鑪�õ����ͱõĽY����ʽ�ЃɷN���Pʽ�p���p���ü��Pʽ���׆�����(���º��Q�p���p���á����׆�����)���p���p���á����׆����ñõ�˲�r�����������Ɇθ׆����õ�˲�r���������B�ӵõ���

�D1 ����Ĥ�����ͱù���ԭ��ʾ��D
���������p���p���ã��ɸĻ�������Dz�ϕ = 90° ����˲�r����qs ����Ҋ�D2������ȡ�л����U�˵���eAr ��o�����U��������eA ��0.8~0.9 ������Ar = (0.8~0.9)A��

�D2 �p���p����˲�r���������D
�����������׆����ã����ĸ�����֮�g����Dz�ϕ = 120° ����˲�r��������Ҋ�D3��

�D3 ���׆�����˲�r���������D
����ͬһ�ٶȅ���ָ����4 �_늙C�ĸ�ۙ�`���ͬ���`���A�S푑�������D6���D7 ��ʾ���ĈD�п�����ϵ�y�ĸ�ۙ�`����0.8 s �ĕr�g�Ⱦͺܿ���Ք���ͬ���`����1 s �ĕr�g���Ք��܉��_������ͬ������ϵ�y������ָ��Ҫ��
����ؓ�dͻ׃(3 s)�rϵ�y�ĸ�ۙ�`���ͬ���`��푑���������D6(a)�͈D7(a)��ʾ���ĈD�п��Կ��������������ⲿ�_�Ӿ����^��ĸ�ۙ�Ք��ٶȣ����܉��ڔ_�ӵ���r�±��֣�ͬ���`����ܿ�څ���㣬�^�õ��_������ͬ������ϵ�y������ָ��Ҫ��
�Y�Z
���������ͱ÷�ֵ��ɢ���g�Ļ��A�ϣ�������ϼ��gͬ�����ƣ��ýM�\��ƽ���������ɿ�����Ч�Ŀ��ƹ��������}�ӣ����˲��H��������ͱ��OӋ������ˮƽ������ᘌ��ܵ���ݔ��ͬ�����Ʒ����о��������ڹܵ���ݔ�ͼ��g�Mһ���ij����c�lչ��