�őҸ����ӱõ����(d��ng)����
����2000 L �őҸ����ӱ������У�������(f��)�s���(d��ng)���}���D(zhu��n)�ӏ���ģ�B(t��i)����; ����Ч��(y��ng)��Ʉ�(d��ng)���W(xu��)ʧ��(w��n); �~݆�~Ƭ��(d��o)���D(zhu��n)�����; �����(f��)�s�ęC(j��)����ģ�B(t��i)���(d��ng)������ͬ�r(sh��)���F(xi��n)����(y��n)��Ӱ��D(zhu��n)�ӷ�(w��n)���ԣ��o���(d��ng)���Ǝ������y�����M(j��n)�о���(x��)�Ŀ������O(sh��)Ӌ(j��)���������У���(du��)��ͬ���(d��ng)���ò�ͬ�������ƣ�����Ч��(y��ng)�������淴������; ���������ӱ��~݆�~Ƭ��C(j��)����ģ�B(t��i)���(d��ng)���������N��ͬ�Ŀ��������f����(sh��)��λ���η�����ԇ�(y��n)�(y��n)�C�˷�������Ч�ԣ����ӱ�ƽ��(w��n)���ٵ�24000 r/ min���әC(j��)�_(d��)�����O(sh��)Ӌ(j��)�������ָ��(bi��o)��
�����u݆���ӱ��ǫ@ȡ����յ�һ��(g��)��Ҫ�O(sh��)�䣬���V����(y��ng)�����������(ch��ng)�ϡ����^�ڂ��y(t��ng)�L�鼰��Ĥ�S�У�늴��S������һ�N�����S�У�����ǽ��|���oĦ�������ġ��S�o(h��)�ɱ��͡���(d��ng)���W(xu��)�ɿز��Ɍ�(du��)�D(zhu��n)�ӄ�(d��ng)��ƽ���M(j��n)������(d��ng)���Ƶ����⃞(y��u)�c(di��n)���ڹ��I(y��)��(y��ng)����ǰ���V韡���(du��)����O(sh��)����ԣ��ǽ��|�Ҹ��Ǻ����������ġ�늴��S�Б�(y��ng)���ڜu݆���ӱã��Ɍ�(sh��)�F(xi��n)���ӱõğo�͡��oĥ�p�\(y��n)�У��\(y��n)�а��o�����(d��ng)�OС�������m�ϰ댧(d��o)�w���I(y��)�ȳ�������Ց�(y��ng)�È�(ch��ng)�ϡ��ڴˣ�����B2000 L �����ɶȴ��S�Мu݆���ӱØәC(j��)�о��M(j��n)չ�����c(di��n)�P(gu��n)ע�őҸ����ӱ�ԇ�(y��n)�о��������ĸ��N��(f��)�s���(d��ng)���Ɔ��}���@Щ���(d��ng)���}�ɸ��N��������(d��o)�£��������D(zhu��n)�ӵď���ģ�B(t��i)���(d��ng)������Ч��(y��ng)��ɵ��D(zhu��n)�ӄ�(d��ng)���W(xu��)ʧ��(w��n)�����~݆���~Ƭ�����һ��(g��)���D(zhu��n)���c���ӱ�����늙C(j��)��ͬ��(d��o)�µď�(f��)�s���(d��ng)ģ�B(t��i)���@Щ����ͬ�r(sh��)���F(xi��n)�����Ҿ��܌�(du��)���D(zhu��n)�ӵķ�(w��n)��������Ɖģ�����ڴ��S�п������O(sh��)Ӌ(j��)��ͬ�r(sh��)��Q���o���������O(sh��)Ӌ(j��)����������y��
�����ڷ��ӱ��D(zhu��n)���O(sh��)Ӌ(j��)�У��D(zhu��n)��һ�A����ģ�B(t��i)�l���ѽ�(j��ng)�M�������h(yu��n)�x�D(zhu��n)��������D(zhu��n)��(d��ng)�l�ʼ�400 Hz,���䌦(du��)�D(zhu��n)�����(d��ng)��Ӱ���Ȼ���ܺ��ԣ������ڸ����\(y��n)�Еr(sh��)������Ч��(y��ng)���һ�A�������(d��ng)����u��(d��ng)ģ�B(t��i)�l���½����@��ͨ���J(r��n)����y(t��ng)�S��֧�е��D(zhu��n)�ӣ�����u��(d��ng)���y�����l(f��)������(du��)늴��S���D(zhu��n)��ϵ�y(t��ng)����(j��ng)�����^�쵽����u��(d��ng)�����l(f��)��������ˣ����D(zhu��n)�ӹ���������(g��)�D(zhu��n)�ٷ�����(n��i)�r(sh��)������(y��ng)�鏝��ģ�B(t��i)���(d��ng)�ṩ������ᣬ����һ�A�����������u��(d��ng)�����l(f��)����(sh��)�ϣ����늴��S�����(d��ng)���Ʋ����]����ģ�B(t��i)������,�D(zhu��n)���o�B(t��i)�Ҹ��r(sh��)�͕�(hu��)���D(zhu��n)�ӏ������(d��ng)���l(f��)������
�������ڷ��ӱ��D(zhu��n)��о�S�ϰ��b�г��u݆����T���ȣ����D(zhu��n)�ӘO�D(zhu��n)��(d��ng)�T���c����D(zhu��n)��(d��ng)�T��֮�ȣ��^���D(zhu��n)������Ч��(y��ng)���@���������ؕ�(hu��)��(du��)���S���D(zhu��n)��ģ�B(t��i)�ķ�(w��n)������ɴ��Ӱ푡�����߅���ᵽ�Č�(du��)����ģ�B(t��i)��Ӱ푣�����Ч��(y��ng)��(du��)�D(zhu��n)�ӄ���ģ�B(t��i)��Ӱ푸����@��������������Л]�в�ȡ����(y��ng)�Ĵ�ʩ����(d��ng)�D(zhu��n)���h(yu��n)δ���_(d��)��������D(zhu��n)�ٕr(sh��)���D(zhu��n)����(d��ng)( �D(zhu��n)��ǰ��u��(d��ng)���wģ�B(t��i)) ���M(j��n)��(d��ng)( �D(zhu��n)�ӷ���u��(d��ng)���wģ�B(t��i)) �͕�(hu��)�����l(f��)���Ɖ��D(zhu��n)�ӷ�(w��n)���ԡ����~݆�ϵ��~Ƭ�������Ȳ�����ƫ�ͣ���Ƭ�~Ƭ��(d��ng)���W(xu��)ģ����Ƒұ�������һ�A�����l����Ҫ�������l�Σ�����Ҫ����300~ 400 Hz ֮�g���D(zhu��n)��Ҫ���_(d��)�乤���D(zhu��n)�٣���횴�Խ�@Щģ�B(t��i)�l�ʡ�����]���m��(d��ng)?sh��)đ?y��ng)��(du��)��ʩ����(d��ng)�D(zhu��n)��ͬ���l�ʽӽ�ij��(g��)�~Ƭģ�B(t��i)�l�ʣ���(du��)��(y��ng)���~Ƭģ�B(t��i)���(d��ng)��(hu��)���D(zhu��n)�Ӳ�ƽ�����(d��ng)�����l(f��)��
�����ڸ��N���(d��ng)���}�У��D(zhu��n)���c������늙C(j��)�Ą�(d��ng)���W(xu��)��ό�(d��o)�µ����(d��ng)ģ�B(t��i)������������ģ�Ҳ�����y��Q�ġ������(d��ng)ģ�B(t��i)��220 Hz �����й̶������(d��ng)�l�ʣ���(du��)��C(j��)���y�Խo��������ጣ������_��(sh��)�c����늙C(j��)��B(t��i)���P(gu��n)����ǰ�ڰ��b�˽�������늙C(j��)�Ĝy(c��)ԇ���ϣ��]���^�쵽�@�ӵ����(d��ng)ģ�B(t��i)�����D(zhu��n)���o�B(t��i)�Ҹ���늙C(j��)�����\(y��n)�Еr(sh��)��ԓģ�B(t��i)���(d��ng)���y�^�쵽����һ���D(zhu��n)������һ�����������䮔(d��ng)�D(zhu��n)����(d��ng)�l�ʽӽ�ԓģ�B(t��i)�������l�ʣ�ԓģ�B(t��i)��(hu��)׃�ú�Σ�U(xi��n)���䷀(w��n)���ԜpС����K��(hu��)�Ɖ��D(zhu��n)�ӵĄ�(d��ng)���W(xu��)��(w��n)����
������ͬ�r(sh��)��(y��ng)��(du��)���F(xi��n)���@Щ���(d��ng)���}���ڿ�������ʹ���˲�ͬ��ᘌ�(du��)�Է���������Ч��(y��ng)��(d��o)�µ�ʧ��(w��n)ͨ�^���淴��������Q������ģ�B(t��i)���~Ƭ���220 Hz���ģ�B(t��i)���������(d��ng)���}����ͨ�^��λ���ο��Ʒ�����Q������(du��)��(y��ng)��ͬ�Ć��}����(y��ng)���˲�ͬ����λ���δ�ʩ��
���������У��o�����@Щ���(d��ng)�������P(gu��n)��ԇ�(y��n)�Y(ji��)��,�D(zhu��n)����K�ܷ�(w��n)���\(y��n)������������D(zhu��n)��24000r/ min����o���˴őҸ����ӱØәC(j��)���_(d��)���Ļ����������ָ��(bi��o)��
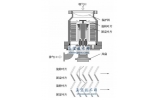
1�����ӱ��D(zhu��n)��ϵ�y(t��ng)
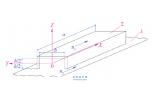
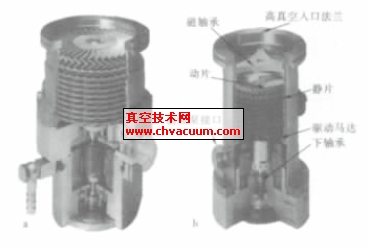
�����u݆���ӱýY(ji��)��(g��u)��D1������( x1��y1) ���Ϗ�����S������ƽ������(bi��o)��( x2��y2) ��������S������ƽ������(bi��o)��

�D1 ���ӱýY(ji��)��(g��u)�����S������(bi��o)
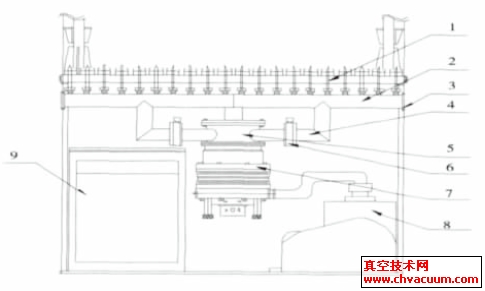
�������ӱ��D(zhu��n)�ӵ���|(zh��)о�S�ϟ��b������늙C(j��)�D(zhu��n)�ӣ��^����5 ��(g��)��˨���b��һ�X�Ͻ��~݆�����ӱ��D(zhu��n)�Ӳ��օ���(sh��)Ҋ��1��
��1 �őҸ����ӱÅ���(sh��)

�������ӱ��D(zhu��n)�����Џ�(f��)�s�Ą�(d��ng)���W(xu��)�����������~݆�~Ƭģ�B(t��i)���D(zhu��n)�ӏ���ģ�B(t��i)���D(zhu��n)�������@������Ч��(y��ng)�����D(zhu��n)�ӽY(ji��)��(g��u)�O(sh��)Ӌ(j��)���ԣ����˱��ⳬԽ�����R���\(y��n)��,�����C�D(zhu��n)���\(y��n)���ڴ��R���B(t��i)�����ʹ��S�г��d�����(d��ng)���Ƶ��y�ȣ��D(zhu��n)���O(sh��)Ӌ(j��)��횱��C��������(g��)�����D(zhu��n)�ٷ�����(n��i)���D(zhu��n)��һ�A�����l���h(yu��n)�x�D(zhu��n)�ӹ����l�ʣ����D(zhu��n)�ӹ����ڴ��R���B(t��i)��
�������(d��ng)���W(xu��)���Կ�ͨ�^����Ԫ(FEM) ����Ӌ(j��)�㡣
���������~݆���~Ƭ���࣬�麆(ji��n)��Ӌ(j��)������^�̣����~Ƭģ�B(t��i)�����c�D(zhu��n)�����wģ�B(t��i)�������_�M(j��n)�С����M(j��n)���~Ƭģ�B(t��i)�����r(sh��)�����~݆�ϸ����~Ƭ����(ji��n)����̽Y(ji��)�ڟo����A(ch��)�ϵđұ������քe�M(j��n)��ģ�B(t��i)�����������l�ʷքe�s��330��370 ��730 Hz���ڌ�(du��)�D(zhu��n)���M(j��n)�����w��ģ�r(sh��)�����~݆�Q��һ��(g��)�o�~Ƭ��ģ�M݆����ģ�M݆�c�挍(sh��)�~݆����ͬ������λ�ü��D(zhu��n)��(d��ng)�T������(sh��)���ڰ��b��ģ�M݆���D(zhu��n)���ϣ��ɷ������ӱ��D(zhu��n)�ӵ����w��(d��ng)���W(xu��)ģ�B(t��i)��
������(ji��n)������D(zhu��n)��ģ�ͣ��c�挍(sh��)�D(zhu��n)�Ӿ��л�����ͬ�Ą�(d��ng)���W(xu��)���ԣ��������D(zhu��n)�ӽY(ji��)��(g��u)�u(p��ng)�������S�п������O(sh��)Ӌ(j��)�ȹ��������M(j��n)���D(zhu��n)�ӄ�(d��ng)���W(xu��)�����r(sh��)������(j��)��(ji��n)��ģ�͵��S��(du��)�Q�ԣ�ģ���M(j��n)һ����(ji��n)������Sģ�ͣ���2D �����~���C����Ԫ��(g��u)�����S��(du��)�Qģ�͡�2D �����~���C����Ԫ�����Ԝ�(zh��n)�_�������Y(ji��)��(g��u)���S��׃�Ρ�Ť�D(zhu��n)׃�κ͏���׃�Ρ���(du��)�����Π��(f��)�s��������Ч��(y��ng)���@���D(zhu��n)��ϵ�y(t��ng)������ԓ��Ԫ�����M(j��n)�и�Ч���D(zhu��n)�ӄ�(d��ng)���W(xu��)����Ԫ�������D(zhu��n)��2D ģ��Ҋ�D2���D��,�D(zhu��n)�ӵ���������S������̎�����Ʉ��Ȟ�500 N/ mm�ď��Ɇ�Ԫ֧�С�

�D2 �D(zhu��n)��2D����Ԫģ��
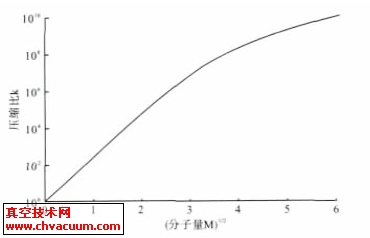
������(j��ng)����ԪӋ(j��)��������D(zhu��n)��ǰ���A����ģ�B(t��i)�l�ʷքe��538 ��1730 Hz����֪���o�B(t��i)���D(zhu��n)��������l��400Hz �h(yu��n)С���D(zhu��n)��һ�A�����l�ʣ��������D(zhu��n)�Ӵ������@����Ч��(y��ng)����횿��]�䌦(du��)ģ�B(t��i)�l�ʵ�Ӱ푡��D(zhu��n)�ӿ�ؐ��( Campbell) �D��D3 ��ʾ���ĈD�п��Կ������D(zhu��n)�ӵĄ���ģ�B(t��i)�l���c����ģ�B(t��i)�l���ܵ��D(zhu��n)������Ч��(y��ng)��Ӱ푾��dz����@����(d��ng)�D(zhu��n)���D(zhu��n)������,�D(zhu��n)���M(j��n)��(d��ng)( ���Է���u��(d��ng)) �l�ʲ����½�( ����څ��0) ��������(d��ng)( ����ǰ��u��(d��ng)) �l�ʲ������ߡ��ڌ�(du��)��(y��ng)��һ�A����ģ�B(t��i)�ķ���ǰ��u��(d��ng)�ϣ�Ҳ���^�쵽��ƬF(xi��n)�����\(y��n)���ǣ������D(zhu��n)���\(y��n)����400 Hz �D(zhu��n)��(d��ng)�l���£���һ�A��������u��(d��ng)�l����Ȼ���@������ͬ���l�ʣ��t������(g��)�����l�ʷ�����(n��i)���Ɍ��D(zhu��n)��ҕ����R���\(y��n)�е��D(zhu��n)�ӡ���(d��ng)Ȼ�����ڏ����l�ʲ�δ�h(yu��n)�x�D(zhu��n)�ӹ����D(zhu��n)�ٷ��������M(j��n)���S�п������O(sh��)Ӌ(j��)�r(sh��)�������(d��ng)����Ч������Ȼ���ܺ��ԡ�

�D3 �D(zhu��n)��Campbell �D
2�����ӱ��D(zhu��n)���cֱ��늙C(j��)�����ģ�B(t��i)���(d��ng)
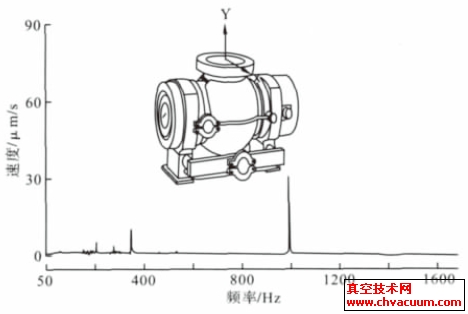
�������ӱ��b���늙C(j��)��2 �O����ֱ��늙C(j��)��늙C(j��)�D(zhu��n)�Ӟ�2 Ƭ�����ߣ�ͨ�^���P��̶����D(zhu��n)��о�S�ϡ�늙C(j��)�D(zhu��n)�����Ų��Ϸ�(w��n)���Բ���(j��ng)�v��(sh��)��(g��)С�r(sh��)�����D(zhu��n)���µij�ʼ�\(y��n)�к��������F��ʣ�Űl(f��)��׃��������׃���������@�r(sh��)��һ�N��ֶ�Σ�U(xi��n)��ģ�B(t��i)���(d��ng)�_ʼ�@�F(xi��n)����(du��)�D(zhu��n)��λ�Ƃ�������̖(h��o)�M(j��n)��FFT �������鿴���l�V�����^�쵽220 Hz �������F(xi��n)��һ��(g��)���(d��ng)�壬�Ҵ����(d��ng)�������������̎�������@���粻���r(sh��)ͣ�C(j��)��ԓ�岻���ϝq������(hu��)��(d��o)���D(zhu��n)��ʧ��(w��n)����(du��)�µķ��ӱ��D(zhu��n)�ӣ��˷��״γ��F(xi��n)��ͣ�C(j��)�ٴ��\(y��n)�Еr(sh��)����(d��ng)�D(zhu��n)��(d��ng)�l�ʸ���350 Hz������λ���l�V��ԓ���(hu��)���г��F(xi��n)�����S�D(zhu��n)������\(y��n)�Еr(sh��)�g�۷e�����l(f��)���@�������D(zhu��n)���o�B(t��i)�Ҹ������ߵ����\(y��n)�Еr(sh��)���s��ȫ�^�첻�����������ڴ��S�����������Ғ��l��̖(h��o),ͨ�^���S���M(j��n)�І�һ�l�����(d��ng)����(l��)��Ҳ�y�Ԍ������l(f��)��������(d��ng)�D(zhu��n)�ٲ�����ߣ�ͬ�l����280 Hz �s��ͨ�^���l��̖(h��o)�ҵ���(du��)��(y��ng)�����(d��ng)�塣
������(d��ng)�D(zhu��n)�ӵ��_(d��)����߹����l��400��220 Hz ��ģ�B(t��i)���(d��ng)���_ʼ߀��(w��n)�����ׂ�(g��)С�r(sh��)��(du��)��(y��ng)��ģ�B(t��i)��λ��FFT ��ֵ��(hu��)���������m(x��)�����L(zh��ng)����K��(d��o)���D(zhu��n)��ʧ��(w��n)��
�����@��(g��)�F(xi��n)��ĺ��������Ȼ�]���ҵ������ǿ���ͨ�^��(sh��)�(y��n)̽�����Դ�����Կ϶����ǣ���ģ�B(t��i)���ǁ�Դ�ڱÚ��w���ǜu݆�~Ƭ�����c늙C(j��)�D(zhu��n)�������F�Ġ�B(t��i)�o�����P(gu��n)�������c�D(zhu��n)����(d��ng)�M(j��n)���\(y��n)��(d��ng)��ϡ��������\(y��n)�Еr(sh��)���D(zhu��n)����(d��ng)�l�ʕ�(hu��)��220 Hz �������@�r(sh��)����(d��ng)�c220 Hz ģ�B(t��i)���(d��ng)����?x��)���ϳ�һ��(g��)�µ��������(d��ng)������һ��(g��)�l��200 Hz �����(d��ng)��
3���������O(sh��)Ӌ(j��)
������(du��)��һ��Ĵ��S�п������O(sh��)Ӌ(j��)���д����Ĺ������@�D(zhu��n)�ӏ���ģ�B(t��i)���(d��ng)�����~Ƭ����D(zhu��n)����(d��ng)�c�M(j��n)��(d��ng)չ�_���ڴ˷��ӱ�ϵ�y(t��ng)�ϣ��@Щ���}�����ڣ��Ұ���һ��(g��)�µ����������220 Hz ģ�B(t��i)���@Щ���}���ͬ�r(sh��)��Q����ᘌ�(du��)�@Щ���(d��ng)�Ŀ�����֮�g�������ڛ_ͻ������������(sh��)��Ҫ�ڸ���(g��)���(d��ng)������Ч�����M(j��n)��֔(j��n)�����У����ǿ������O(sh��)Ӌ(j��)׃�ú����y����(du��)�ڏ�(f��)�s�Ŀ������O(sh��)Ӌ(j��)���T��H] ��L �C�ϵ��������Ʒ������������������ǣ���(du��)�ڹ��I(y��)��(y��ng)�È�(ch��ng)�ϣ�����ͨ���^�ڏ�(f��)�s���Ҟ���������^�ڱ��أ���Ȼ��Ҫ���_��ģ����Ϣ�����M����(zh��n)�_���������N����(sh��)�IJ��_���ԡ�����(du��)�ڴ˷��ӱ�ϵ�y(t��ng)���H220 Hz ģ�B(t��i)����Ϣ�ͺ��y�ṩ���ٿ��]���I(y��)��(y��ng)�õČ�(sh��)�H��r,�������Ʒ����y�Բ��á�������ڴ��S�п������O(sh��)Ӌ(j��)�У�����]����λ���η������@�N��������˼����ͨ�^��һ��(g��)���A(ch��)�����������Ӳ�ͬ�NĞV��������׃��ֲ��l�ʷ����ķ��l�����l���ԣ���������(y��ng)�l����?q��)�ģ�B(t��i)���(d��ng)�M(j��n)����Ч���ơ��@Щ�V����ͨ�����ӵ�һ��(g��)PID �������У��Ը�׃PID �������ľֲ��l�ʷ��������(d��ng)�������ܡ��V�����ą���(sh��)���Ը���(j��)�������Ƶ�ģ�B(t��i)���(d��ng)�IJ�ͬ��������M(j��n)���{(di��o)����
3.1������ģ�B(t��i)���(d��ng)����
������(du��)���\(y��n)���D(zhu��n)�ٳ��^��ӽ��䏝��ģ�B(t��i)�l�ʵĴ��S���D(zhu��n)�Ӷ��ԣ�����ģ�B(t��i)���(d��ng)�����Ʊ�횳�ֿ��],��t��(d��ng)���ڏ����l�ʸ��������(d��ng)�ɷ֣����粻ƽ�⼤����������ģ�B(t��i)���(d��ng)�����ױ����l(f��)�������mȻ�˷��ӱ��D(zhu��n)�Ӟ���R���D(zhu��n)�ӣ���һ�A����ģ�B(t��i)���(d��ng)��Ȼ��Ҫ�M(j��n)�����ơ�ͨ�^��λ���η����ڴ��S��PID����������������(y��ng)�����ΞV������������Ч��ߌ�(du��)����ģ�B(t��i)�����ᡣ�@�������õ���λ���ΞV��������A�ݲ������䲮�D��D4��ͨ�^������S�п����������Ӵ˞V������������Ч����һ�A�����l�ʷ��������Ŀ����������c��λ���ԣ����@��׃?c��)���PID ��������(du��)����ģ�B(t��i)���������ԡ���������һ�A�����l�ʸ�������λ��(hu��)���@���ӡ����ӞV��������һ�A����ģ�B(t��i)����u��(d��ng)�l��������Ч��(y��ng)�S�D(zhu��n)���½�����������Ȼ���Ԟ�һ�A�������(d��ng)�ṩ���ᡣ

�D4 ����һ�A����ģ�B(t��i)�����ΞV�������D