EAST���l����ע���b�����ϵ�y�OӋ
����EAST ���l����ע���b����Ҫ�������EAST �п��R���b�õļ��Ϻ�߅�����ģ(ELM) ����о���ע�������w�����ѽ���ɘ���������ʹϵ�y��ȫ�B�ӵ�EAST �b�ã���Ҫ�OӋһ���������ϵ�y�����l����ע���b�����ϵ�y������ȫ�µ��OӋ����ע�������w���B���������_�ң������M���w���r���ߣ����ͳɱ��҉����Դ���߳ɱ��|����ע�����cEAST �b��ͨ�^�ɼ����ϵ�y�B�ӣ��Mһ�������b�É�����5×10-4 Pa����������cEAST �İ�ȫ�B�Ӳ�Ӱ�������늡�
����EAST �������ϵ�һ��ȫ�����LjA�����п��R���b�á���2006 ���״γɹ�����ԁ��������õ�������ߡ��ڵ��x���w�s���\��ģʽ(H-mode)�±��l��߅�����ģ(ELM)�����b�õ�һ����ɘO��ğ�_�������͵�һ�ڲ���ʹ�É�������Α����@�N�F���ѽ��ɞ��׃��һ�����ֵĆ��}�����µ��о����������l����ע�뼼�g��һ�N��֮��Ч�Ŀ���ELM ���ֶΡ��������l����ע���b�õ��OӋ��������һ��ȫ�µĸ��l����ע���b�á���ϵ�y�Ě�/뮏������ע���l�ʿ��_50 Hz�����˝M����ϵ�y����նȵ�Ҫ����Ҫ�OӋһ�����ϵ�y��
1������
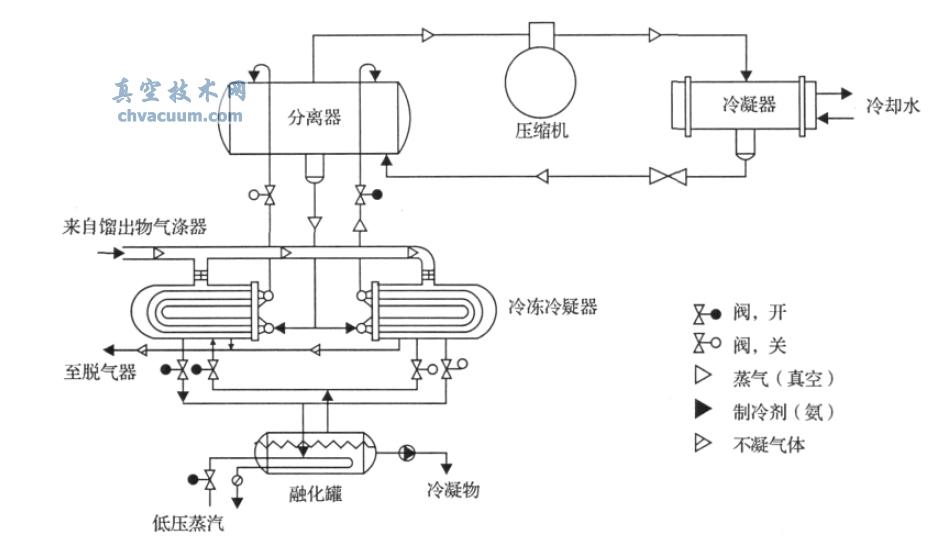
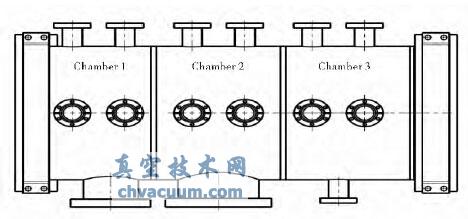
�������l����ע���b����2012 ���״�Ͷ��EAST���������10 Hz �Ĺ����l�ʰl���/뮏����EAST �b�ü��ϡ����˱��C���\���^���У����M���w(����)���������M��EAST ��������У����l����ע���b�ò����˃ɼ���ֵ����ϵ�y�OӋ����Y����D1 ��ʾ����һ��������w�e17 L�B��һ�w�e355 L ��Û�ң��ó���470 L/s ���_Ɲ�ÙC�M��⣻�ڶ���������w�e17 L ֱ���B��FF-200 �ͺϷ��ӱÙC�M��⡣���\���^���У��ܱ��C�ڶ��������ն��S����10-4 Pa ���ң����@�ӵ���խh���£����M���w��EAST ����յ�Ӱ푿ɺ��ԡ����ǵ��l����ϵ�y���L�r�g�B�m��������r�£��ڶ����������նȕ�����׃���Ҫ��ͣ�\��һ�Εr�g������նȻ֏͵�����ˮƽ�������^�m���������������M���w���ڵ�һ�����̎�e�ۣ����ܱ����r���ߡ�
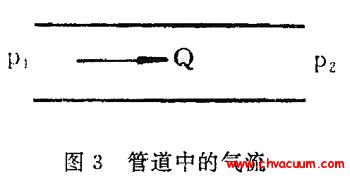
�D1 ���l����ע���b�����Sʾ��D
�������l����ע���b���c���lϵ�y����ԭ�����ƣ�Ҳ������Һ������������/ 뮚��w��ͨ�^�Cе�D�����и�ķ�ʽ�Ƴɏ��裬��K�ø߉�������ُ���ͨ�^���L�ܵ����뵽EAST ������҃ȡ����l�����һֱ��1.5 mm���L��1.2 ��1.8 mm ���{�ĈA���w����l���ٶȸ����O�������M���w������ͬ����150 ��250 m/s ֮�g׃��������֮�⣬���lϵ�y��������l�ʸ��_50 Hz���l��ÿ�l��������Ҫ����20-30 mbar·L �ĺ��⣬�@�Ӵ����ĺ��ⲻ���r���ߣ���Ӱ푵�EAST �b�õ�������늡��������������Ӱ푣����˷����lϵ�y���ڵĆ��}�����b���l����ϵ�y�ăɼ���ֽY�������ڴ˻��A������һЩ���M���OӋ���@���l����ע���b�����ϵ�y��
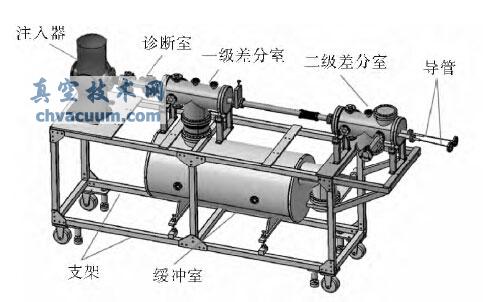
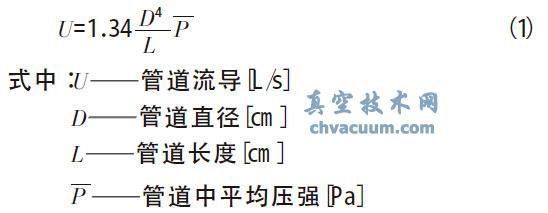
�������l����ע���b�����ϵ�y��Ҫ�ɾ��_�ң��ɼ�����ң���ձýM���Լ���՜y���������B�ӹܵ��ȽM�ɡ����˴_�����M���w�����M��EAST ������ң���Ҫ���˃ɼ�����ҵ���նȣ����B��EAST ������ҵėl����ԔҊ��1�����Ãɼ�����ҵĽY���OӋ���܉�����ȵĜp���M��EAST ������ҵĚ�������ո��������b��֧���ϣ������cע����ע���·����ͬһˮƽ�߶ȣ���Y��ʾ����D2 ��ʾ���µ����ϵ�y�����_������ע�������w�²����ڏ�����ͼ����A���Uɢ�ͳ��߶��������á��µľ��_���OӋ�����pС�˺ɼ�����ҵĹ���ؓ�d��߀�������ˏ���ɱ����|���Ϳɿ��ԡ�
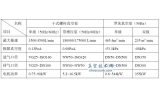
��1 �ɼ�����ҵĹ�����ն�Ҫ��

�D2 ���l����ע���b�����Sʾ��D
2����ղ��ϵ�y�OӋ
����2.1�����_���OӋ
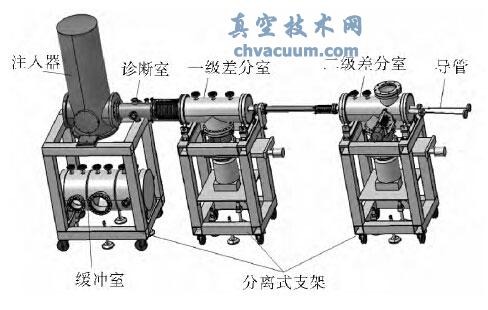
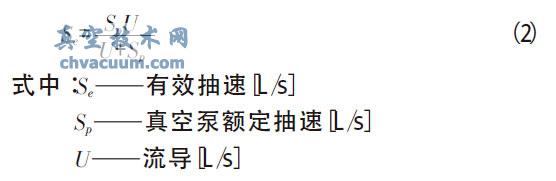
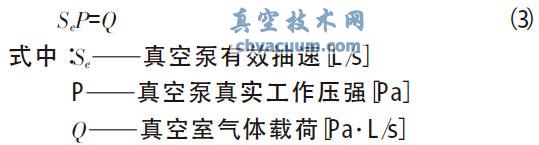
����ȫ�µď���ע�����������ת�����ע��ϵ�y��ÿ��ϵ�y�܉���25 Hz ���l�ʪ��������l�䏗�衣���l�����Ԍ�ϵ�y�Ŀɿ��������Ҫ������ߏ���ij����|���Ϳɿ��ԣ��ڏ�����ͺͼ���ϵ�y���B��һ�����_�ҡ����_���c������ͺͼ���ϵ�y���B�Ӻ��D����D3 ��ʾ���D2 �е������1�������2 �������3 ��β���B����ͬ�M���˾��_�ң�Ҋ�D4���������4 �t���������ϵ�y���\���ҡ��̓ɼ�����ҡ�����������g�����M���w�Uɢ�����_�ҵ���������҃ȣ�����ձýM���ߣ��p�ٔD���ɱ��҃ȵ����M���w�����Ķ���߳ɱ��|����
�D3 ������ͺͼ���ϵ�y���D
����һ������ٺͳ���ϵ�y�ѽ�������ɣ�������һЩ�������_��yԇ���õ���һЩ�����Ĝyԇ����������ÿ�l������ɵĚ��w�d�ɷֲ�Ҋ��2�����ڏ���ע�������������r���d�ܴ������Ǿ��_���е������2������x�ô����470 L/s���_Ɲ�ÙC�M(WAU2001/SV630B)�����������2 �ıýM�� �x�ó���203 L/s ���_Ɲ�ÙC�M(WAU1001/SV300B)���������1 �ıýM�������3 �B�ӔD���ɱ��ң���Ҫ���ڳ���U���͏U�⣬�x�õ��dz���16.6 L/s �ğo�͜u����ձ�(GWSP10000)��
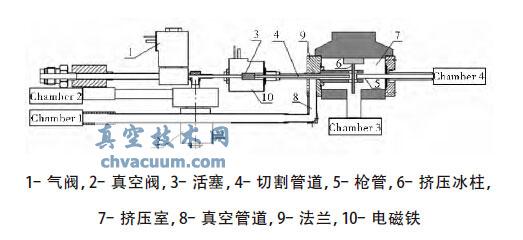
�D4 ���_�ҽY�����D
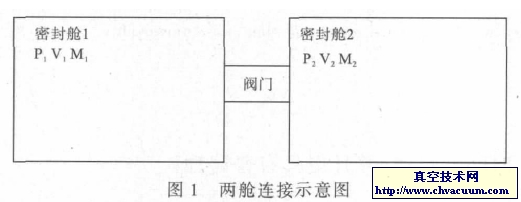
�������ڳ����yԇ�rֻ������һ������ٺͳ���ϵ�y�����ҳ��ڜyԇ���õıýM�c���m����һ�����b�r���ñýM����һ�£���Ҫ�����_�ҵ��w�e�Y���������M���OӋ����ֿ��]����ϵ�yͬ�r������d�ɹ�������r�������܉�����ȵİl�]��ձÙC�M�����ܣ����C�����M���w�M�����ų����OӋ�������O�_Ɲ�ÙC�M�����������٣�Ҳ���Ǽٶ���������������������������O��500 Pa�����]�˚��d���������B�ӹܵ������غ��x������������w�e����21.43 L�������1�Ãȏ�100 mm���L��3.3 m �Ĺܵ��B���_Ɲ�ÙC�M�������2 �Ãȏ�150 mm���L��3.3 m �Ĺܵ��B���_Ɲ�ÙC�M�������3 ����ͨKF40 ���^(�ȏ��s��35 mm)���L1 m ���y���B�ӡ�
��2 �ΰl�������M���w�d�ɷֲ�

��������ǰ��ļ��O���ܵ��е�ƽ����������������ҵ�P D ֵ������0.67 Pa·m���ܵ��е����B��ճ����������������B���x��������ʽ(1)�M��Ӌ�㣺
�������딵���������1 �ܵ�������20303 L/s�������2 �ܵ�������102784 L/s�� �����3 �ܵ�������1005 L/s���ٸ�����Ч���ٹ�ʽ(2)��Ӌ�����ձõ���Ч���٣�
��������ã������1 �_Ɲ�ÙC�M��Ч����201 L/s�������2 �_Ɲ�ÙC�M��Ч����467 L/s�������3�o�͜u����ձ���Ч���ٞ�11.5 L/s��������Ӌ��õ�����Ч���٣���������ʽ(3)Ӌ����ƽ��r������҃ȵĉ�����
���������w�d���ָ����ΰl����Ě��d(ȡ���ֵ)�����l�ʣ�Ҳ��������l��50 Hz���ɵ������1 �Ě��d��3×104 Pa·L/s�������2 �Ě��d��7.5×104 Pa·L/s�������3 �Ě��d��1×104 Pa·L/s�������������룬�������1 �Č��H���B����������150 Pa�������2 �Č��H���B����������161 Pa�������3 �Č��H���B����������869 Pa���鿴���ýM�Ĺ�������- ���������������_�������٣������ܵ��B�Ӳ����������dz������Ԍ��H�Ĺ���������������Ӌ���^��Ӱ푷dz�С������ֱ���J��Ӌ��Y���c���ڵļ��O���Ǻϵġ������f���_�ҵ��OӋ����Փ���ǿ��еģ����ԝM���OӋҪ���������M���w�M��D���ɱ��ҵĿ��ܣ�����˳ɱ��|����
����2.2���ɼ�������OӋ
���������Mһ���Ľ���ϵ�y�ĉ����� �_���cEAST ������B�ӵėl������Ҫ���Ãɼ��������ҵĽY�����ɼ�����ҵ���Ҫ�������Mһ���ij����������M���w���⣬ʹ�ڶ�������ҵĉ���������10-4 ���������£����C���l����ע��ϵ�y�������\���^�����܉������cEAST ������B�ӣ�����Ӱ�EAST �b�õ�������늡�
�����ɼ�������ڽY�������ƣ��ɂ�����ҵ��w�e���Ǽs17 L�������ÙCе��ǰ������Turbo-V1001 ���ӱó�⣬������ij�����870 L/s ���ҡ���һ������ң�
����ǰ������К��w�d�ɷֲ����������ھ��_�Ҿ��B���Cе������r�µõ��ģ����҂����´��ϵ�y���õ��Ǵ���ٵ��_Ɲ�ÙC�M������֮�⣬�҂�߀�����\���ҵ�һ�����m�B�ӵ����_�Ҷ�̖�_Ɲ�ÙC�M�ϡ����@�ӵ���r�£�ǰ���ᵽ�Ćΰl�����M�뵽�D3 �������4 �Ě��w�d�ɑ�ԓ�����pС���ΰl������������M���w����30 mbar·L ��ӛ�����^ģ�MӋ�㣬����29 mbar·L�Ě��w������ǰ�˵ă����_Ɲ�ÙC�M���ɱ����ߣ��M�뵽��һ������ҵĚ�����s��1 mbar·L�����ӱ�ֱ���B���ڲ�����²��������ܴ�
�������õij���Ӱ푺�С���҂������J��õ��~�����ټ�����Ч����870 L/s������50 Hz ����l��Ӌ�㣬���w�d�ɞ�5×103 Pa·L/s���ٴ���ʽ(3)��Ӌ��ɵô˕r�ĉ�����Ş�5.74 Pa�����ӱ���Pa�������������½����҂�����Ӌ�㣬ȡ���ٞ�600 L/s���ٴδ���ʽ(3)���õ�������8.33 Pa���ڶ�������ң�
�������M���w���M��ڶ��������֮ǰ����Ҫ���^һ�ȏ�6 mm���L��2 m �ļ��L�ܵ�������ƽ��������ʽ�����܃ȵ�ƽ�������s��4 Pa��PD≈0.24 Pa·m������6.65×10-3 Pa·m ��0.67 Pa·m֮�g��̎��ճ��- ������������ճ��- ������������ʽ(4)��
���������P����֪J �s��3.08������ʽ(4)�ùܵ�������4.02×10-2 L/s�������w������Q=U×8=3.21×10-1 Pa.L/s���ڸ�����ʽ(3)���õڶ�������ҵĉ�����������3.69×10-4 Pa��С�ڱ�2�Ќ��ڶ��������յĹ�����BҪ�������Ժ��Ը��l����ϵ�y���M���w��EAST �b�õ�Ӱ푡�
����2.3����՜y��ϵ�y
���������܌��r�رO�y��������ՠ�r�����Cϵ�y�ĸ������܉������\�����ھ��_���Լ��ɼ�������϶����b�Мy����Ҏ�������_�����������r�ĉ����^�ߣ������ڰ������������ɼ�����ҵĹ��������^�ͣ���Ҫ�ǵڶ�������������\�Еr�ĉ���Ҫ����10-4 Pa ���¡�
�������ˏ���ע�뱾������՜y���c�⣬���ϵ�y��һ����5 ���y���c���ھ��_�ҵ�����������Ϸքe���b����TRP 280 Ҏ�ܣ��ڃɼ�������ϰ��b�ɂ�PKR 251 Ҏ�ܡ�ϵ�y�\�����g��ͨ�^�xȡҎ��ʾ�����_����ϵ�y��̎�������������������F�����r���r��ȡ��ʩ������ϵ�y�p�ġ�
������նȵ��xȡ��ӛ���ͨ�^Ҏ���B�ӵ����Ӌ��PLC ���F�ġ����Ӌ��Ҫ���ڬF���yԇ�r�����r�O���x�������ã���PLC �t���h�̿��ƺ�ӛ���Ք���׃����������ڲ鿴��ն��Ěvʷ�������鿴ϵ�y�\�еĿɿ��ԡ�ϵ�y�ϸ�����y����ձýM����ͨ�^PLC �ķ�ʽ�h�̿��ƣ��M���_�P���������������ϕr�ܼ��r�M���h��̎����
3�����Y
��������Ӌ��Y��������ǰ�˾��_�Ҵ_���ܼ��r�س��ߺ��⣬��ʹ���ýM��������Ѡ�B�£������˺����M��D���ɱ��ҵĿ����ԣ�����˳ɱ��|�����҃ɼ�������Ҳ�Mһ���ؽ���ϵ�y��նȣ���ȫ�B��EAST ����յ����á����l����ע���b�����ϵ�y����Փ�OӋ�ѽ��M����������OӋҪ�F���M�����a�����A�Σ�ϵ�y��쌢��2015 ��10 ������Ͷ��ʹ�á�δ�����l����ע���b�ô���֮�����ȕ��M��ϵ�y�z©�����ܜyԇ���ڸ����l���yԇ�l�䏗��ɿ��ԣ��yԇ���ϵ�y�Ƿ��ܰ����OӋ��Ҫ���������������o��һЩ�����Č��Y����