���oˮ�{���y���Q�{ԇ
������B�\�ЙC�M���oˮ�{���y���Q����{ԇԇ��Ŀ���������{ԇԇ��L�U������ˑ�����ʩ�����ؽ�B���oˮ�{���y�{ԇ�^���г��F�Ć��}��̎��������
���������l�����Ǻ�늏S�P�I�O��֮һ�������l����ˮλ����ϵ�yͨ�^���ƽoˮ�{���y���_�ȣ��{���oˮ�c��������ƥ�䣬�S�������l����ˮλڅ�ڳ���Һλ��ʹ�����l�����a�����ġ�Ʒ�|�ϸ����������݆�C���������oˮ�{���y�nj��F�����l����ˮλ���Ƶ��P�I������
����ij��늏S��ԭ���oˮ�{���y�\���^���г��F���������r�y�T�_���^�������l����ˮλ���Ʋ������F�����M�и��죬���Q���oˮ�{���y�������oˮ�{���yͶ�\ǰ�����ڲ�ͬ�\�й��r���M�����Pԇ����C�¸��Q�����oˮ�{���y�M���OӋҪ�����ڴ_�����oˮ�{���y���Q���{ԇԇ��Ŀ�Ļ��A�ϣ��������{ԇԇ��L�U������ˑ�����ʩ�����ؽ�B�{ԇ�^���г��F�Ć��}��̎��������
1������ԭ���c�y�T����
����1.1�������l����ˮλ����ԭ��
������ؓ�ɹ��r�£������l����ˮλ���ÆΛ_�����ƣ�����·�{���y�{���oˮ���������oˮ�{���y�P�]���ڸ�ؓ�ɹ��r�£��������_�����ƣ����oˮ�{���y�������oˮ�����������������Լ������l����ˮλ���_��������̖���{���oˮ��������·�{���y�P�]�����_���{����ˮλ�{���Լ������{��2���{����Ԫ(����)�M�ɡ��OӋ���S�C�M������15%FP~20%FP(FP��M����)�r�������M���������y�ГQ��
����1.2�����oˮ�{���y���܅���
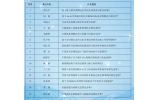
�������oˮ�{���y������Ͳ�{���y�����ö�����ʽ��ӱ�Ĥ���ЙC���͘˜���Ͳ�yо����Ͳ����ͨ���ڞ����ڡ��������y�w���O��Ͳ���yо����Ͳ�錧�������\�ӣ����F�����{������Ҫ����ָ�����£��OӋ������10MPa���OӋ�ضȣ�250�棻������̖��4~20mA(DC)����̖��Դ��0.08~0.2MPa����Դ������0.3MPa��
����1.3�����oˮ�{���y���ЙC������ԭ��
�������oˮ�{���y���ЙC���������ʽ��ӱ�Ĥ���ЙC������Ҫ�����鱡Ĥ��ǻ�Ͱ��b�ښ�ǻ�ϲ��ď��ɡ����Կ�������4~20mA������̖ͨ�^��λ�����ƚ�ӷŴ����M�������M�⽛�^��ӷŴ������M���ǻ����ǻ�������ӣ���ĤƬ�Ϯa��������ʹ���ЙC���ƗU�����\�ӣ��M�������yо�������������c���ɷ�������ƽ��r���yо������ij��λ���ϡ����Ɖ�����0.08~0.2MPa�������y�T�_��0~100%���ھo����r�£�늴��yS1��S2���܁��Ԍ��Oϵ�y�����oˮ���x��̖��ʧ늺��ų���ǻ�������ڏ����������y�T��5s���P�]������ԭ��Ҋ�D1��
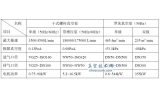
�D1 ���oˮ�{���y����ԭ��ʾ��D
1—���oˮ�{���y��2—�-���y�T��λ����3—��ӷŴ�����4—��ǻ��5—����y��6—늴��yS1��7—늴��yS2
2���{ԇ�Ŀ���L�U�c����
����2.1���{ԇԇ��Ŀ
����(1)���Pԇ�z�����oˮ�{���y�յ����O��ȫ�Oʩϵ�y�l�������oˮ���x��̖���ܷ���5s�ȿ����P�]�����C�¹ʹ��r�����oˮ�܉�Ѹ�ٸ��x����ֹ��������s��ϵ�y�^�䡣
����(2)��B�Ԅ��ГQԇ����ͣ�Ѡ�B�£�ͨ�^������oˮ��������̖��C���oˮ�{���y�c��·�{���y��Ԅ��ГQ߉�����������ГQ�^���нoˮ�{���y�o������ͻ���F��
����(3)��B�Ԅ��ГQԇ��C�����\�Еr�����oˮ�{���y�c��·�{���y��Ԅ��ГQ�����������ГQ�^���������l����ˮλ׃�������ڼ��gҎ���Ҏ�������S�����ȡ�
����(4)�����l����ˮλ����ԇ�(���_���{��)����C���������\�Еr����ӳ���ˮλ±5%�A�S׃������������±5%�A�S׃���������l����ˮλ����ϵ�y�ĄӑB푑��ܷ�M���OӋҪ��
����2.2���{ԇ�L�U
����(1)����Q���oˮ�{���y���ڙC�M�������g��ʩ��ԇ��M�Еr�������S���\�л�ӌ�ԇ��Ŀ��Ӱ푣�����ԇ�ɹ����O��p���L�U��
����(2)�������̖��ԇ��Ŀ������̖��������e�`����̖ݔ���e�`����Ӷ����ŕr�`����߅�O�䣬����ԇ�ɹ����O��p���Լ�ͣ�Cͣ���L�U��
����(3)�����l����ˮλ����ϵ�y���_���{�����������������^���У������l����ˮλ����ƫ���ͣ�Cͣ���L�U��
����2.3���L�U����
����(1)ᘌ���һ��L�U��һ�Ǐľ���ԇ��ĿӋ�����֣��ڴ���Ӌ�������_ԇ�r�g���ڣ�Ҫ��ԇ��M�����g�����M�п���Ӱ�ԇ��������ӣ����漰�x���Դ���x�É��s�՚�ϵ�y�ȵľS���ߙz�鹤�������dz���˽��c�������oˮ�{���y���b�A�Ά��wԇ���r�������ڬF���M��ԇ�r�����չ������������M�У���Ոԇ�Σ���������Ӌ���r�g�����M�й�����ԇʩǰ���_�Jԇ��S���C�õ����ʺ��k��ԇ��S���C�_�����_�������_��ǰ����ͨ��ԇ��L�U��ע����헵ȃ��ݣ����ͮ���ֵ�L�̶�ԇʩ�ľ��w���E��
����(2)ᘌ��ڶ���L�U��һ�Ǿ���ԇ�Ҏ�̕r���漰����̖����ģ�Ҏ���б�����_��������̖���������F�����H��r����ԇ�Ҏ���M�Ќ��飬��Ҫ�r���档���Ǐ��{ʹ�÷�����ʧ�`���ߣ�ԇ�ǰ�M�й�ǰ�������_ԇ��Ŀ��ԇ�Ҫ�c�Լ������A���ȣ���ԇ��^���ПoՓ��ԇ��ˆT�M�в�Ӷ������Լ�����ģ�M��̖߀���\���ˆT��ϲ�����Ҫ����Ҏ�̣�ԇ�ؓ؟��ؓ؟�O�oԇ�T�M�в�Ӷ����ŵȹ��������ٿv�T�O�o�ٿv�T�M���\�в�����ԇ�T�Լ��ٿv�T�����r����ԙz��ԇ��ˆT�c�\���ˆT�֮�gʹ���������������_�Լ�����ָ�����������Ϣ��
����(3)ᘌ�������L�U��һ�����_ָ���ٿv�T��2�����ٿv�T�����ԇ��^���е��\�в�����ᘌ������l����ˮλ���քӸ��A��ԇ�ǰ��ģ�M�C���M�Ќ����Ӗ����������ˮλ�A�S׃�������������A�S׃����ԇ��Ŀ���������_��Ҫ�քӸ��Aˮλ�{����ˮλ��ֵ�Լ�����׃����ֵ��ˮλ�A�S�������A�S׃���^��ֵ������αƽ���ʽ����������С��ֵ�A�S��̖�������{���������������e�օ�����Ȼ������ԇ�Ҏ�������A�S׃����̖�M��ԇ����ԇ��_ʼǰ��늏SӋ��C�Ƚ���׃���M���^���������Pע�����P׃��׃��څ�ݣ����r��ȡ푑���ʩ��
3���{ԇ�^��
�����{ԇ�֞���B�{ԇ�Լ���B�{ԇ2���A�Ρ�
����3.1����B�{ԇ
������B�{ԇ����ͣ�Ѡ�B��ʩ���������Pԇ����B�ГQԇ���Pԇ�ͨ�^��ģ�M������ƽ���ضȵ��������oˮ�{���y�P�]��ԇ�Y���M���OӋҪ����B�ГQԇ����ڙC��ȼ���ģ�M�˹��ʵ���̖���Ӿ���ԇ�T�����ՈD���M�У���һ��ԇ�T�����_�J����B�ГQԇ������ɡ�
����3.2����B�{ԇ
������B�{ԇ�^���������bʹ�õĶ�λ���IJ�ͬ�֞�3���A�Ρ�
����3.2.1����һ�A�Σ�A�Ͷ�λ�� A�Ͷ�λ���鉺������ܶ�λ����
�����Ԅ��ГQԇ�l�F��
����(1)���oˮ�{���y�_���P�y˲�g�г��{�F�������oˮ����˲�g�ϛ_�����ȼs60t/h��
����(2)�o�_�yָ��r�����F���ڶ�λ���a�⌧�����oˮ�{���y�_�y�������oˮ����������r��
����(3)�y�TͶ���Ԅӿ��ƕr�����oˮ�������ڲ��ӣ����ȼs25t/h��
����������{���������������ԟo���������ӬF�����չܵ������^�M�оo�̺��ٴ��M��ԇ���ӬF���������ƣ����_�y�^����������Ȼ�г��{�F���ГQԇ��^���г����{���������ϛ_���������M��Ҫ����������30%FP���F��ʎ�F�����oˮ�{���y�_����3%��37%���oˮ������110t/h��605t/h�����ʎ��
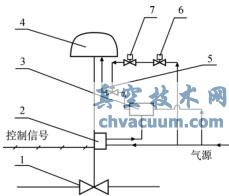
�������^�������Д������y�T�����ʎ��ԭ����ԓ��̖��λ�����ښ��wй©�����O�������Լ����չܾ����ɱ�����pй©��ӛ�������������ܾ�й©ʹ��ǻ�����½��M�������y�T�_���½�1%�r����λ�������a�⣬�˕r�y�T���F��ʎ�����w���п�DҊ�D2��
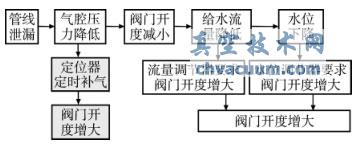
�D2 �{���y��ʎ����
�����ɈD2���Կ������{���y�_�ȜpС��ʹ�ýoˮ�������ͣ������l����ˮλ�½��������{�����Լ�ˮλ�{�����M�б��^����o���m�˵��_�yָ��M��������ˮλ�֏ͣ����D2���Ӱ���ֶ�λ�����r�a�⌧���y�T�_�����t���������l����ˮλ�]�h����ϵ�y����������_�y�������nj��³��{�M����ʎ�ĸ���ԭ����λ�����^�O��ֵ����ӷŴ����M���{��Ҳδ�ܸ�׃��ʎ�F��
����3.2.2���ڶ��A�Σ�B�Ͷ�λ����������ʎ�F���QB��ģ�M�Ͷ�λ�����˶�λ������ͨ�^��������B�m�a�⣬�ʌ����wй©�����С��ГQԇ�r�l�F�����}��
����(1)�քӲ����o���y�T����ָ�������푑�����30~40s���ӕr�F��
����(2)�Ԅӿ��ƕr�o���y�T����ָ����y�T����������������e��һ�Εr�g��oˮ�����ŕ���һ��ͻ׃���s20t/h��
�������{����ӷŴ������y�T푑��������ƣ��Ԅ���r��ˮλ��������X��������׃�L���l�ʽ��ͣ����o���Ք���ˮλ����ԇ�r���ڌ��A�S׃����푑��{���^���У�ˮλ���������o��X������Ͷ���Ԅ���r��ˮλ�����Ԟ���X�����S��C�M��������50%FP�����ք��{���S��ˮλ�r���{���y��������F�����@�������P�y����s20s���_�y����s35s��
��������ԇ���������Q��ģ�M�Ͷ�λ���������˳��{�Լ���ʎ���}���������y�T����푑��ӕr�F���քӲ����r�Ȟ���ء�
����3.2.3�������A�Σ�C�Ͷ�λ�� �C�M�\�Еr���քӲ������A�����l����ˮλ��������B�Ͷ�λ�������y�T����푑����t�����Fˮλ���ɿ����ͣ��M������ͣ�Cͣ�ѵ��L�U�^�ߡ���ˣ����QC�͎������������ܶ�λ���M��ԇ
�������Ȍ��y�T�M���o�B�yԇ��ͨ�^�{���Ŵ����Լ���λ����������������λ����Դݔ���������Ȇ��}���o�B�yԇ�ϸ�
�������mԇ��^���Пo푑��ӕr�F��Ҳ�o��λ�����r�a��F���}�飺
����(1)�քӲ����r�²����^���y�T�_�ȟo�����������oˮ�������Ӽs30t/h���ҡ�
����(2)20%FPƽ�_ԇ���ɣ����oˮ�{���yͶ�Ԅӿ��ƺ����oˮ�������ڼs15t/h�������ӡ�
����(3)�S���C�M�������ߣ��������ӷ���Ҳ��u���ߣ�30%FP�r��������������25t/h��35%FP�r���������������s35t/h��
��������η����{����ӷŴ������������������e�օ������V���r�g�����ȣ��������ӬF��δ�ܸ��ơ�
�����{���y���Ӳ��H�����������l����Һλ���ӣ�����ͣ�Cͣ���L�U��߀�������y�Uĥ�p������й©�Ȇ��}���{���y�]�h���ƻ�·��һ�h�����F���ӣ����������{���y���ӣ����ܵ�ԭ��������y����̖�_�ӣ��������M�����ϣ�������ݔ������������̖��ݔ�h���B���Ʉӡ����|��������λ������ӷŴ������ϡ���·���������ЙC�������ܷⲻ�����yо�Ʉӣ��y�UĦ�����^��ȡ�
����ͨ�^��ԇ��^���M�з������ų�׃������ݔ�뿨�Լ���̖��ݔ�h�����}������ԭ�������λ���y�T���w�;͵ؿ���ϵ�yԪ������Ҫ���y�T��·���]�Բ�����U�Ʉӡ���λ�����ܲ�ƥ�䡢�y�UĦ�����^�Ŵ���������ƥ��ȡ�
�����Mһ���z��l�F�̶����y�U�ϵ��yλָʾ�A�K�c�y�T֧�ܱ��w����Ħ���F���������y�UĦ�����������y�U�������a�����ӡ����w�^�̞飺ݔ����̖׃���r(���A�S��̖)������Ħ�����^��ʹؓƫ���^��λ���e������ʹݔ�����������������˷��oĦ�����r�y�T�����������oĦ�������ڄ�Ħ�������y�T���{��ؓƫ��׃����ƫ����ͳ��{�����²��ӡ�
������pСĦ�������y�T֧���M���˴�ĥ��ͬ�r�����y�T�o�B��B�£�����λ�������M��������������������������{����λ���������e�օ�����
�����ٴ�ԇ�{���y���ӬF��õ����ƣ��քӠ�B20%FPƽ�_�o���ӬF��35%FP��55%FPƽ�_С�����ӣ����������s15t/h���Ԅӿ��Ơ�B���܉�S�������l����ˮλ���������ڼs20t/h���g���������ӡ��͵ؙz���y�T���l�F�yλָʾ�A�K�c�y�T֧�ܱ��w��Ȼ����Ħ����
4���YՓ
�������\�ЙC�M���Q���oˮ�{���y���ش��g���죬�ڙC�M�������ĕr�g��Ҫ���ԭ�y�T��������y�T���b���{ԇ�ȹ����������^���L�U����ռ��g�W��http://www.jnannai.com/���J���״�Ͷ�둪�õ����y�T���{ԇ�^��Ҳ�����^���L�U��
������ᘌ����wԇ��Ŀ�����������L�U������ȡ�������ߡ���ǰ�ڲ��߂�ԇ�l������λ���x�ʹ��ڲ��㣬ͨ�^�F���{ԇ���_���˶�λ����̖��ͨ�^�������c��λ����ϣ�ʹ���{���y�ڲ�ͬ����ƽ�_�£��y�T������푑������M���OӋ�ʄt��ϵ�y�\�������_���˸����Ŀ�ġ�
�����yλָʾ�A�K�c�y�T֧�ܱ��wĦ�����������y�UĦ�������y�UĦ�����^��ʹ��A��B�Ͷ�λ���Ϳ������������e�օ������ܝM�㌍�H�������y�T��ʎ�Լ�푑��ӕr��C�Ͷ�λ�����Կ˷���ʎ�Լ�푑��ӕr�����������������y�UĦ�����^���µ��y�T���ӡ�ֻ�Џ��y�T���w���֣�ͨ�^�y�T�\�����w�z����ֶ��Mһ�������yλָʾ�A�K�c�y�T֧�ܱ��wĦ����ԭ������Ħ�������ĸ����Ͻ�Q�y�T���ӆ��}��