���������㷨�ĵ綯ִ�����������
��������ɵ��������ɵĵ綯ִ�������ܾ�ȷ��λ�����⣬������һ���µĵ綯ִ���������㷨--�����㷨�����Ի��ڸ��㷨�ĵ綯ִ���������˷����������ͬ�ڴ�ͳ�ĵ綯ִ���������������㷨�ĵ綯ִ��������Ҫ�κ��ƶ�װ�þ�����Ч�����õ���Ĺ���ȷ��λ����ϸ�����������㷨������Matlab���ʵ���˸��㷨�����Ե綯ִ�������з������顣��������֤�������㷨�Ŀ����ԡ���Ч�Լ������ԡ�
1������
�����綯ִ������Ϊ��ҵ�Զ�����ϵͳ�е�ִ��Ԫ����Ҫ���ϵͳ������ָ���������١�ȷ�ķ�Ӧ����ȷ��ϵͳ���������С���Ե綯ִ������Ŀǰ��Ҫ�����о����ǿ����㷨�������������ʽ���ƶ���ʽ�������ֳ����߹㷺Ӧ���ڹ�ҵ�����У������ֳ����ߵ�����ִ����Ҳ��Ŀǰ�о���һ������
����Ϊ�˽�����ڵ���Ĺ��Զ�����綯ִ�������ߵ����⣬Ŀǰ���õķ����Dz��û�е�ƶ�������ƶ����˷�����Ĺ��ԡ���Ȼ��բװ�û����豸��ʹ�������ͣת�����ǵ綯ִ�����ĽṹҲ��˱���쳣���ӣ�ͬʱ�侫ȷ��Ҳ�����ƶ�װ�õĻ�еĥ����ܵ�Ӱ�졣�������㷨���ǻ������õ������ʹ�綯ִ����ȷ��λ�Ļ���˼�롣ͨ���Ի��������㷨�ĵ綯ִ�������з������飬�����ó������㷨�Ŀ���Ч��ȡ���ڵ����ת�������������㷨�IJ�������һ���������£����������㷨�ĵ綯ִ�����ܹ�����ȷ�ض�λ��
2���綯ִ�����Ľṹ
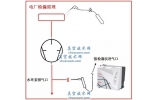
�����綯ִ������Ҫ�ɿ��Ƶ�Ԫ�������ִ�л�����ɣ������ԭ����ͼ1��ʾ�����Ƶ�Ԫ���ݸ����ź�����ڻ���λ�Ʒ�������ƫ���������������������У��������ټ�����װ�������λ�ƻ�ֱ�г�λ�ƣ�ʵ�ֶԷ��š�����ȵ��ڻ�����λ�ÿ��ơ�

ͼ1 �綯ִ����ԭ����ͼ
�����綯ִ�����Ļ���ģ�Ϳɼ�Ϊ��
����ʽ�У�θ--�綯ִ�����Ľ�λ�����;ua--���Ƶ�Ԫ�������

����ʽ�У�J--����ܵ�Чת������;f--����ܵ�Чճ��Ħ��ϵ��;CM--����ϵ��;Z1--����������ֳ���;Z2--����Ӷ����ֳ���;M3--����Ӷ����ֵĸ������ء�
3�������㷨
�������������㷨�ĵ綯ִ��������Ҫ�ƶ�װ�ÿ˷�����Ĺ��ԡ�λ�÷����ź�������źŵ�ƫ��Ϊek=sp–y����ek�ﵽ�����趨����ֵʱ���綯ִ�����ĵ���ϵ磬���ת���ڹ��Ե������£��������ڻ����ﵽ�趨ֵ��
3.1�������㷨�Ļ���˼��
��������Ϊ�綯ִ������λ�÷���ֵ�����ֵ֮���ƫ��ek�趨����������ֵ����������ֵα����������ֵβ����ͼ2��ʾ��
������ƫ�����ֵ����αʱ�������ͨ��������ѹ;��ƫ��ľ���ֵ����α��β֮��ʱ���жϵ����Դ�����ת���ڹ���������ת������������ֵβ�뾫����أ���ƫ�����ֵС��βʱ������Ϊ�綯ִ�����Ѿ��ﵽ�˾���Ҫ�����㷨�������uk��ȡֵΪ0��1��-1���ֱ��ʾ����ϵ硢ʩ�������ѹ��ʩ�ӷ����ѹ��

ͼ2 ��������ֵα����������ֵβ
3.2�������㷨�ľ�������
����(1)��ek≥αʱ��ִ�������y��������I�������ڻ�����λ�û�û�ﵽ�趨����������ֵ������Ӧ����ת����Ҫ�����ʩ�������ѹ���������㷨�����uk=1��
����(2)��β≤ek<αʱ��ִ�������y��������II�����ڡ�������֮�䡣�Դ˷�����������ۣ�
�����ٹ���һ�������ڵĿ����㷨���uk-1=1��ƫ��ek-1≥α��ִ�������y��ǰһ���IJ������ڸմ�����I��������II����ʱӦ�жϵ���ĵ�Դ����uk=0��ʹת���ڹ��Ե������¼���ת�����������uk-1=1��β≤ek-1<α��˵��ִ�������y����һ��������֮ǰ���Ѿ�����������II�����ڹ�����������Ȼû�е����������������Ҫ���������ʩ�������ѹ��uk=1��
��������һ������ǣ������һ�������ڵ����uk-1=0��˵������һ�����������У�ת���Ѿ��ڹ���������ת���ˡ�����������¾�Ӧ�жϵ��ת���Ƿ��Ѿ�ֹͣ����ek≠ek-1��˵�����ת�ӻ�ûֹͣת���������㷨�����uk=0���õ�������ڹ���������ת�������ek=ek-1��˵�����ת���Ѿ�ֹͣ����ô���������ʩ�������ѹ����uk=1;
����(3)��0≤ek<βʱ��ִ�������y������III���ﵽ����Ҫ��Ӧ�жϵ����Դ����uk=0��
����(4)��ek<-αʱ��ִ�������y������VI�����Ӧ�÷�ת��ʹy��С������Ӧ�����ʩ�ӷ����ѹ����uk=-1��
����(5)��-α≤ek<-βʱ������β≤ek<α��������ƣ��������������
�����ٵ�uk-1=-1��ƫ��Ϊek-1≤-αʱ��ִ�������y�մ�����������Ӧʹ����ϵ磬��uk=0��ʹת�����ù���ת�������uk-1=-1��-α≤ek-1<-β��˵��ִ�������y�ڹ��������»�û�����������ڣ���ʱ���Ӧ�÷�ת����uk=-1��
�����ڵ�uk-1=0ʱ��˵������һ�����������е���Ѿ��ϵ磬����������¾�Ӧ�жϵ��ת���ڹ��������µ�ת���Ƿ��Ѿ�ֹͣ����ek≠ek-1��˵�����ת�ӻ�ûֹͣ��Ӧʹ��������ڹ���������ת���������㷨�����uk=0�����ek=ek-1��˵�����ת���Ѿ�ֹͣ����ִ�������y��û��������������ô��Ҫ�ٸ�����ӷ����ѹ����uk=-1��
����(6)��-β≤ek≤0��ִ�������y������ִ�������y�Ѵﵽ����Ҫ��ʹ����ϵ磬uk=0��
3.3�������㷨����ѧ����
�����������������㷨������������ʾΪ��ʽ(4)��ʾ����ѧ����ʽ��

4������ʵ��
�������ݱ���ʽ(4)������Matlab���ʵ�������㷨�����ֱ��ڵ�λ��Ծ�����������¶Ե綯ִ�������з��档
4.1���綯ִ�����ĵ�λ��Ծ��Ӧ
��������ʽ(2)��ʽ(3)��֪��k��τ��ֵ������ת������J�ɷ��ȡ����ѡȡ����k��τ��ֵ���ڵ�λ��Ծ�����¶Ե綯ִ�������з��档����k��τ��ֵ�ֱ�Ϊ��k=0.012��τ=0.5;k=0.0012��τ=0.05�������㷨�еIJ�������������ֵ����������ֵ��Ϊα=0.005��β=0.003���綯ִ������λ��Ծ��Ӧ������ͼ3��ʾ��
����ͼ3˵�������������С����ʱ�����������㷨�ĵ綯ִ�����ܿ��١�ȷ�ض�λ�����ǵ������ת����������ʱ���綯ִ������λ��Ծ��Ӧ�ij��������ӣ�����ʱ��䳤�������ת������̫�綯ִ�����ᷢ����������Ϊ�������̫��ʹ���ת���ڹ��Ե�������ת��̫���ڡ���������ֵ֮���Сʱ��ƫ��ľ���ֵ�Oek�O���Ǵ�����������ֵA����ʹ�綯ִ���������ڵ�����Ե������´ﵽ�趨ֵ��

ͼ3 ��ͬת�������ĵ綯ִ������λ��Ծ��Ӧ
��������ת������̫������⣬ͨ���ı���������ֵα���Ե������Ϊk=0.0012��τ=0.05�ĵ綯ִ�������з��棬�õ���������ֵα=0.005��α=0.03ʱ�綯ִ�����ĵ�λ��Ծ��Ӧ������ͼ4��ʾ��

ͼ4 ѡȡ��ͬ��������ֵ�ĵ綯ִ������λ��Ծ��Ӧ
������ͼ4��֪����������α��0.005���ӵ�0.03�綯ִ��������ʱ���̣������ٶȼӿ죬���dz�����û�м�С��
4.2���綯ִ������������Ӧ
����Ϊ����֤���������㷨�ĵ綯ִ������ʱ���������Ӧ�������������¶Ե綯ִ�������з��档
����ѡȡ������������k=0.012��τ=0.5;k=0.0012��τ=0.05;k=0.00012��τ=0.005�������㷨�еIJ�������������ֵ����������ֵ��Ϊα=0.005��β=0.003���綯ִ������������Ӧ������ͼ5��ʾ��
������ͼ5��֪���ڵ��ת��������Сʱ�����������㷨�ĵ綯ִ������Ѹ��ȷ�ض�λ������ʱ�������źš����������ת����������ʱ���綯ִ�����ڹ��Ե�������ƫ���趨ֵ��ʹƫ���������������ֵ���Ӷ��綯ִ�����������õ���Ĺ���ȷ�ض�λ��

ͼ5 ��ͬת�������ĵ綯ִ����������Ӧ
�����ı���������ֵα�Ե綯ִ�������з��棬�õ���������ֵ�ֱ�α=0.005��α=0.03ʱ�綯ִ������������Ӧ������ͼ6��ʾ��

ͼ6 �ı��������趨ֵʱ�綯ִ������������Ӧ
������ͼ6��֪���ı���������ֵ�Է�������Ӱ�첻���ԣ�˵�������㷨����ʱ��������źŵĸ���������Ҫȡ���ڵ����ת��������
5������
������Ե綯ִ�����ƶ�װ�öԵ綯ִ�����ṹ�����ܵ�Ӱ�죬Ϊ�˼綯ִ�����Ľṹ��ͬʱ����䶨λ��ȷ�ԣ��о��������㷨�ڵ綯ִ�����е�Ӧ�á����ø��㷨�ĵ綯ִ��������Ҫ�ƶ�װ�á�ͨ����ƫ��������������ֵ����������ֵ��ʹ�綯ִ�����ڵ�����Ե���������ȷ��λ��ͨ����������ó����ۣ����ѡ����ʵĵ��ת����������������ֵ�����������㷨�ĵ綯ִ������ʵ��ȷ���ٵض�λ�����ǣ�����ʱ��������źţ��ڵ��ת������̫�������£���ʹ������������ֵ�Ĵ�С����Ȼ��ʹ�綯ִ����ȷ��λ����ˣ���θ��ƻ��������㷨�ĵ綯ִ������ʱ������ĸ������ܽ�����һ�����о�����