基于线圈电流的永磁真空断路器控制方法
为使永磁真空断路器(VCB)分合闸的动作时间保持一致,实现可靠的同步关合,基于永磁机构(PMA)的动态特性,分析了动触头在不同运动阶段下的线圈电流,以及参考电流曲线的获取方法。基于Simulink控制模型,通过改进滞环控制方法有效实现了对参考电流曲线的跟踪。为检验控制算法,设计了以ARM 处理器为核心的智能控制器,通过选取3种不同容量的储能电容,在150~200V电压范围内进行了断路器的分合闸实验。结果表明,基于上述控制原理设计的控制器可以有效控制断路器的动触头的行程轨迹,使动触头的运动轨迹与参考电流曲线的运动轨迹保持一致;在选定的线圈参考电流曲线下,实际断路器分合闸的动作时间的误差≤0.3ms。
引言
当断路器开断和闭合电力设备时,电压初相角是随机的,因此关合瞬间系统会产生涌流和过电压,对电力设备造成损害。同步关合技术可以减小操作过程中的涌流和过电压、缩短系统暂态过程、提高电力系统的稳定性、减小对断路器自身的损害、提高其分断能力。其技术关键在于提高机构操作的准确性。传统断路器的操动机构的动作分散性大、运动可控性差、响应速度慢,限制了其在同步关合领域的发展。永磁机构的零部件少,结构简单,通常只有一个运动部件,其动作分散性小,机械寿命长,为开关同步关合技术的实现提供了很好的保证。由于操动机构的可靠性直接影响永磁真空断路器的运行可靠性,因此,永磁机构动态特性的研究受到了广泛的关注。文献对永磁机构动态特性进行了相应的理论分析,为基于电流曲线控制的方法提供了理论基础。
虽然永磁机构的动作分散性较小,但是由于其储能电容的容量易受温度影响,且电压不稳定,线圈电阻率会发生变化,因此会造成断路器的动作时间发生改变。由于永磁机构动态方程较为复杂,几乎不可能建立一个精确的数学模型来在线计算上述原因造成的动作时间误差进行补偿、进而实现实时控制。因此,使用基于人工神经元网络的方法来预测动作时间成为实现同步关合的一种可行方案。由于该算法是在开环状态下完成控制的,因此断路器触头的动作过程无法控制,使同步关合技术存在不确定因素。此外,基于人工神经元网络需要大量的实验数据进行网络训练,增加了实施的难度。而断路器动触头位移曲线的闭环控制方法虽然可以对断路器动触头的行程进行准确控制,但其位移传感器在工作过程中的内部测量抽头处于运动状态,测量次数有限,自身容易发生故障,且位移传感器通常需要与动触头连杆直接连接,不易安装,也容易诱发电气故障,因此限制了其应用。
本文提出了一种以永磁机构线圈电流为控制对象,通过改进型的滞环控制算法对参考线圈电流进行跟踪控制的方法。真空技术网(http://www.jnannai.com/)认为基于这种控制方法,永磁机构本身无需增加任何部件,即可实现对断路器触头状态的控制,使断路器的动作时间保持在一定值,为断路器同步关合的实现提供了可靠基础。通过设计以ARM处理器为核心的硬件系统,实现了对12kV单稳态永磁真空断路器分合闸的准确控制,使分合闸动作时间误差在≤0.3ms,满足同步关合时要求的合闸时间误差≤1ms、分闸误差≤2ms的技术要求;同时也使得永磁机构的励磁线圈和断路器的动触头得到保护。
1、永磁机构的线圈电流特性
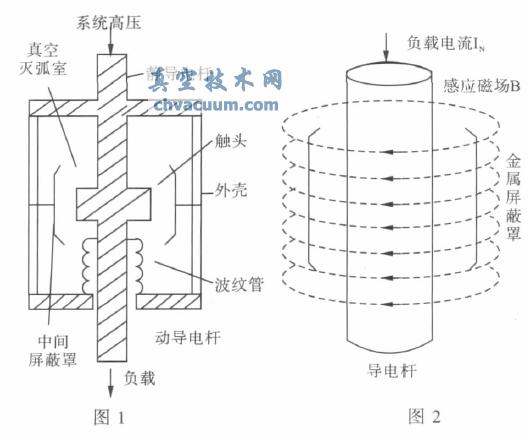
永磁机构的动态特性是由电磁和机械的综合过渡过程决定的。为了能够有效灭弧,应适当加快动触头的速度;然而若动触头速度过大,则会引起碰撞能量的增加,不利于电气和机械寿命的提高。因此,准确计算并分析永磁机构的动态特性、使断路器动作过程中电磁力与运动反力合理配合对机构与开关本体检特性的配合具有重要意义。永磁机构的动态特性可以由式(1)来描述
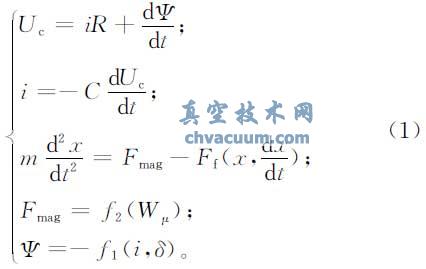
式中:Uc为电容电压;i、Ψ 分别为线圈电流和电磁系统全磁链;δ为磁场间隙;t为时间;Wμ为电磁系统的磁能,是i、Ψ 的函数;x 为衔铁位移;m 为系统运动部件归算到衔铁处的质量;Fmag、Ff分别为衔铁受到的电磁吸力和运动反力;C、R 分别为电容容量和线圈等值电阻;f1和f2分别为合闸过程中电磁吸力和磁通的变化。
6、结论
1)文中所述获取电流参考曲线的获取方法,可以有效控制动触头的运动状,减小动触头的碰撞能量,使相同条件下,断路器的重合闸次数得到提高,有利于实现多次重合闸。
2)实验表明,基于所述控制算法设计的控制器,实现了对12kV单稳态真空断路器的智能控制,使真空断路器的分闸和合闸误差范围均≤0.3ms,保证了分合闸时间的一致性,为同步关合创造了可靠的基础。由于无须在断路器本体机构增加任何环节,参考曲线获取由控制器自身采样获得,因此控制方法简单可行,具有较高的实用价值。